





























Note
Action
0
°
60
°
300
°
240
°
180
°
120
°
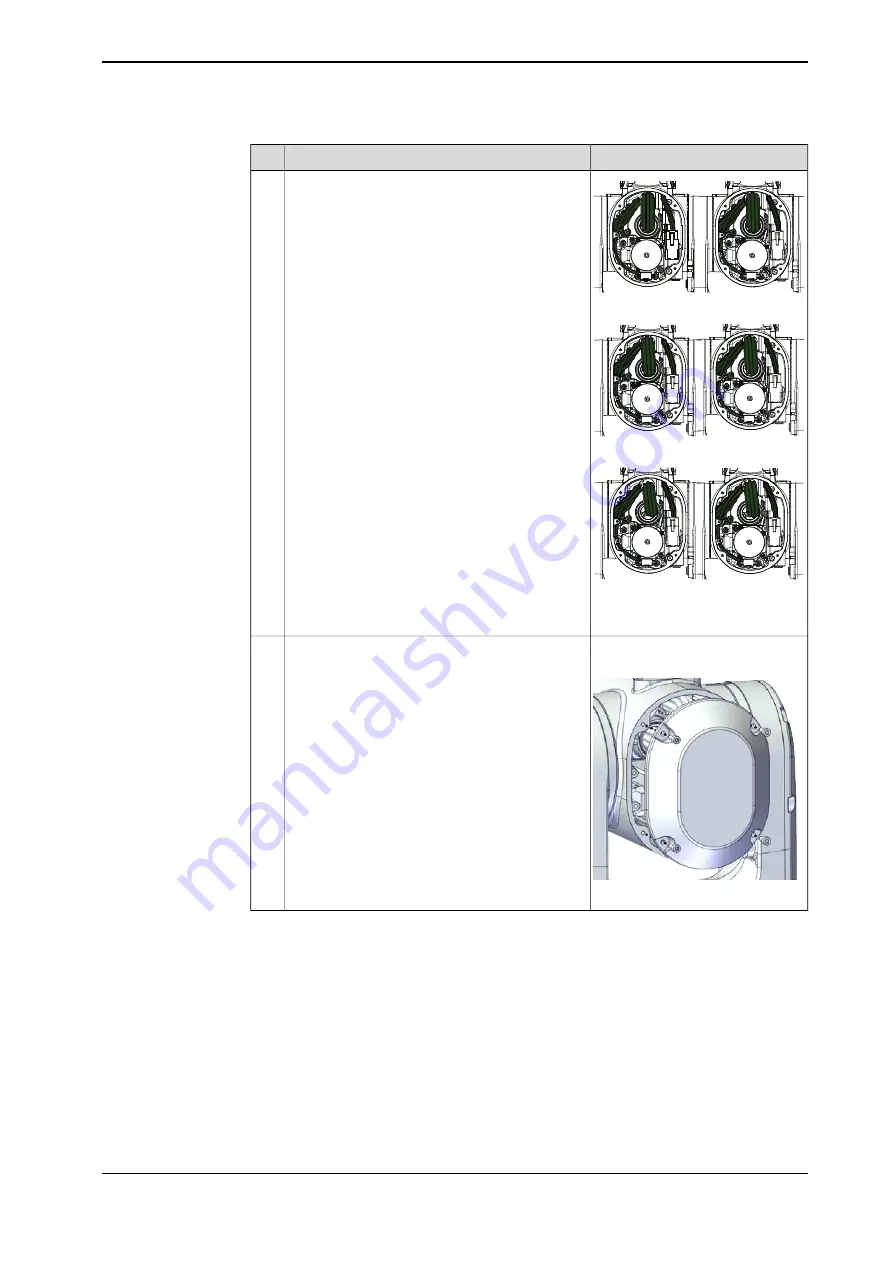
xx1800003319
Cable harness twisting towards right
Jog the axis 4 clockwise (with the operator facing
the rear) until the cable harness begins turning
left. Then, jog the axis 4 back until the cable har-
ness is in vertical state.
4
Screw: M3x8 (4 pcs)
Refit the housing cover.
5
Tightening torque: 1.2 Nm
xx1800003011
If the axis is rotated one or more turns from its calibration position before updating
the revolution counter, the correct calibration position will be lost due to non-integer
gear ratio.
At delivery the manipulator is in the correct position. Do NOT rotate axis 4 at power
up before the revolution counters are updated.
Continues on next page
Product manual - IRB 1100
719
3HAC064992-001 Revision: L
© Copyright 2019-2022 ABB. All rights reserved.
6 Calibration
6.3.1 Updating revolution counters on OmniCore robots
Continued
Summary of Contents for IRB 1100
Page 1: ...ROBOTICS Product manual IRB 1100 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 38: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 738: ...This page is intentionally left blank ...
Page 760: ...This page is intentionally left blank ...
Page 764: ......
Page 765: ......







































































