





























3.6.2 Customer connections
Introduction to customer connections
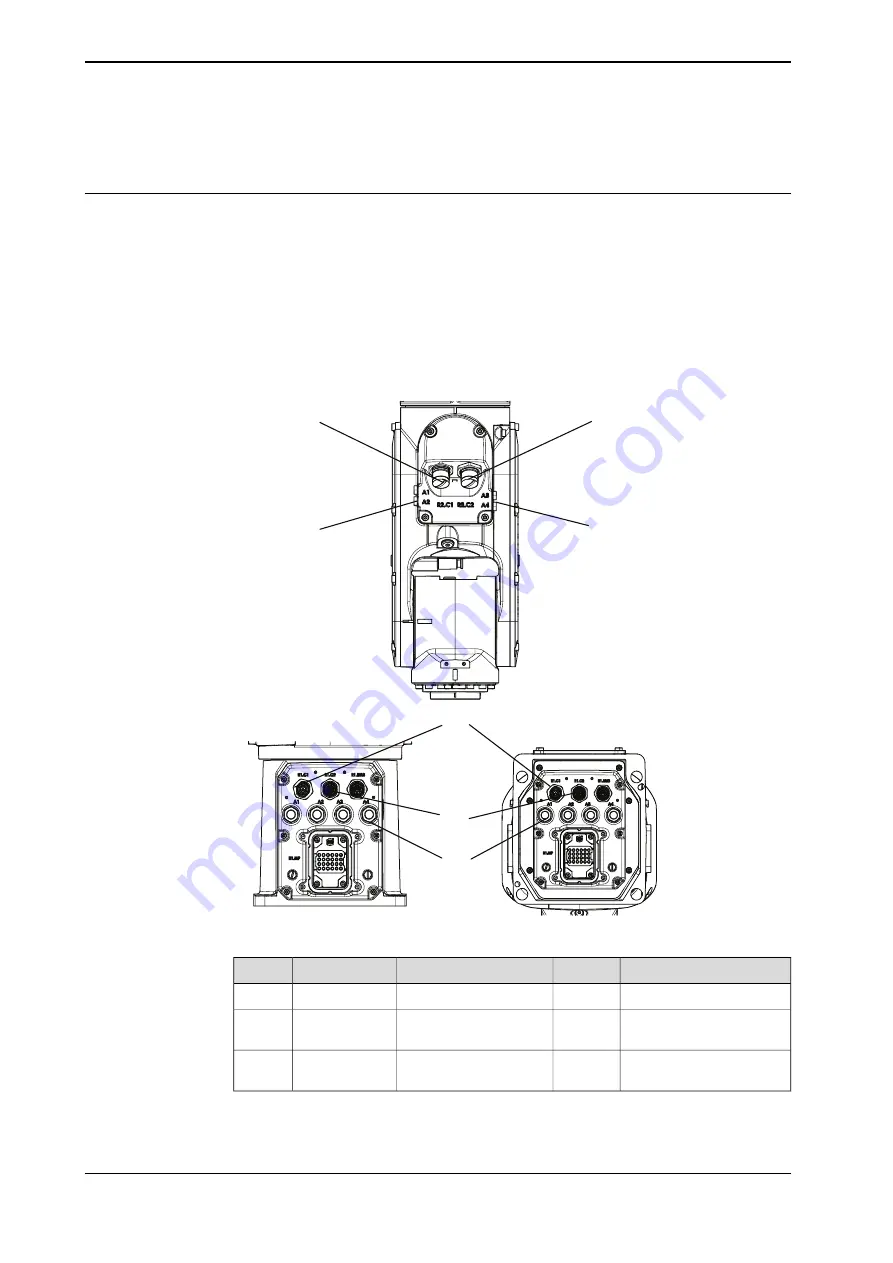
The cables for customer connection are integrated in the robot and the connectors
are placed on the wrist and one at the base. There is one connector R2.C1 at the
wrist. Corresponding connector R1.C1 is located at the base.
There is also connections for Ethernet, one connector R2.C2 at the wrist and the
corresponding connector R1.C2 located at the base.
Hose for compressed air is also integrated into the manipulator. There are 4 inlets
at the base (R1/8”) and 4 outlets (M5) on the wrist.
(A)
(B)
(C)
(A)
(B)
(C)
(C)
xx1900000131
Value
Number
Description
Connection
Position
30 V, 1.5 A
8 wires
i
Customer power/signal
(R1)R2.C1
A
30 V, 1 A or 1 Gbits/s
8 wires
Customer power/signal
or Ethernet
(R1)R2.C2
B
Outer diameter of air hose:
4 mm
4
Max. 6 bar
Air
C
i
The connector has 12 pins. Only pins 1 to 8 are available for use.
Continues on next page
88
Product manual - IRB 1100
3HAC064992-001 Revision: L
© Copyright 2019-2022 ABB. All rights reserved.
3 Installation and commissioning
3.6.2 Customer connections
Summary of Contents for IRB 1100
Page 1: ...ROBOTICS Product manual IRB 1100 ...
Page 8: ...This page is intentionally left blank ...
Page 16: ...This page is intentionally left blank ...
Page 38: ...This page is intentionally left blank ...
Page 50: ...This page is intentionally left blank ...
Page 738: ...This page is intentionally left blank ...
Page 760: ...This page is intentionally left blank ...
Page 764: ......
Page 765: ......







































































