





























Information
Action
Tightening torque: 1 Nm.
Refit the
wrist side covers
.
22
Attachment screw M3x8 (3 pcs)
Tightening torque: 1 Nm.
A
B
C
xx0900000901
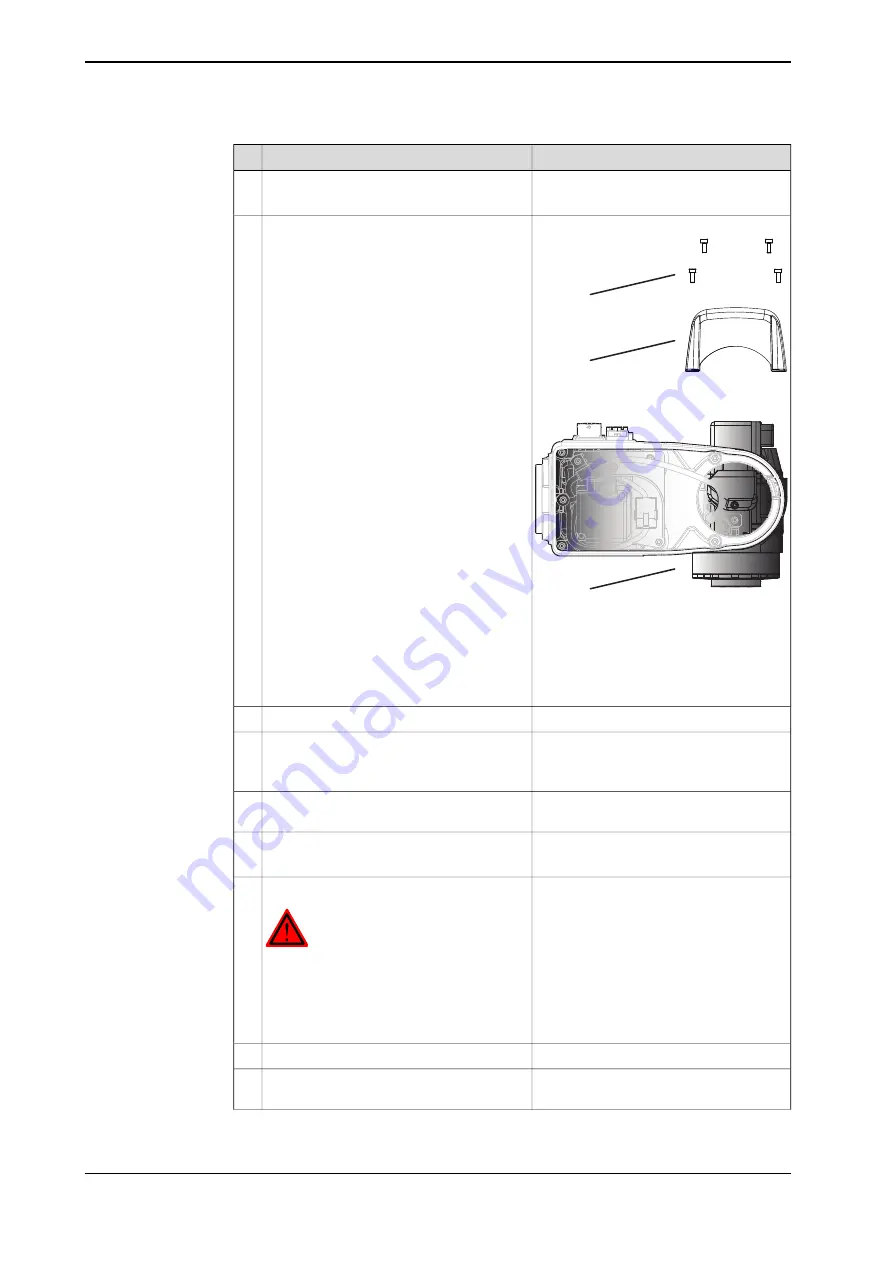
Refit the
tilt cover
.
23
Parts:
•
A: Attachment screw M3x8 (4 pcs)
•
B: Tilt cover
•
C: Motor axis 6
Put cable grease on the sleeve in axis 4.
24
Tightening torque: 1 Nm
Refit the
housing cover
at axis 4.
•
housing cover
and
•
lower arm cover
.
25
Attachment screw M3x8 (8 pcs)
Put cable grease on the cable harness and
sleeve in lower arm.
26
Tightening torque: 1 Nm
Refit the
lower arm cover
at axis 4.
27
Attachment screw M3x8 (4 pcs)
Connect the robot to the
power
source.
DANGER
Make sure all safety requirements are met
when performing the first test run. These
are further detailed in the section
- First test run may cause injury or damage!
on page 47
.
28
Jog the robot to 90° in axis 1.
29
Fasten the two remaining screws at swing
plate/base.
30
Continues on next page
146
Product manual - IRB 120
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
4 Repair
4.3.2 Refitting the cable harness
Continued
Summary of Contents for IRB 120
Page 1: ...ROBOTICS Product manual IRB 120 ...
Page 8: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 114: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 254: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 270: ......
Page 271: ......







































































