





























Information
Action
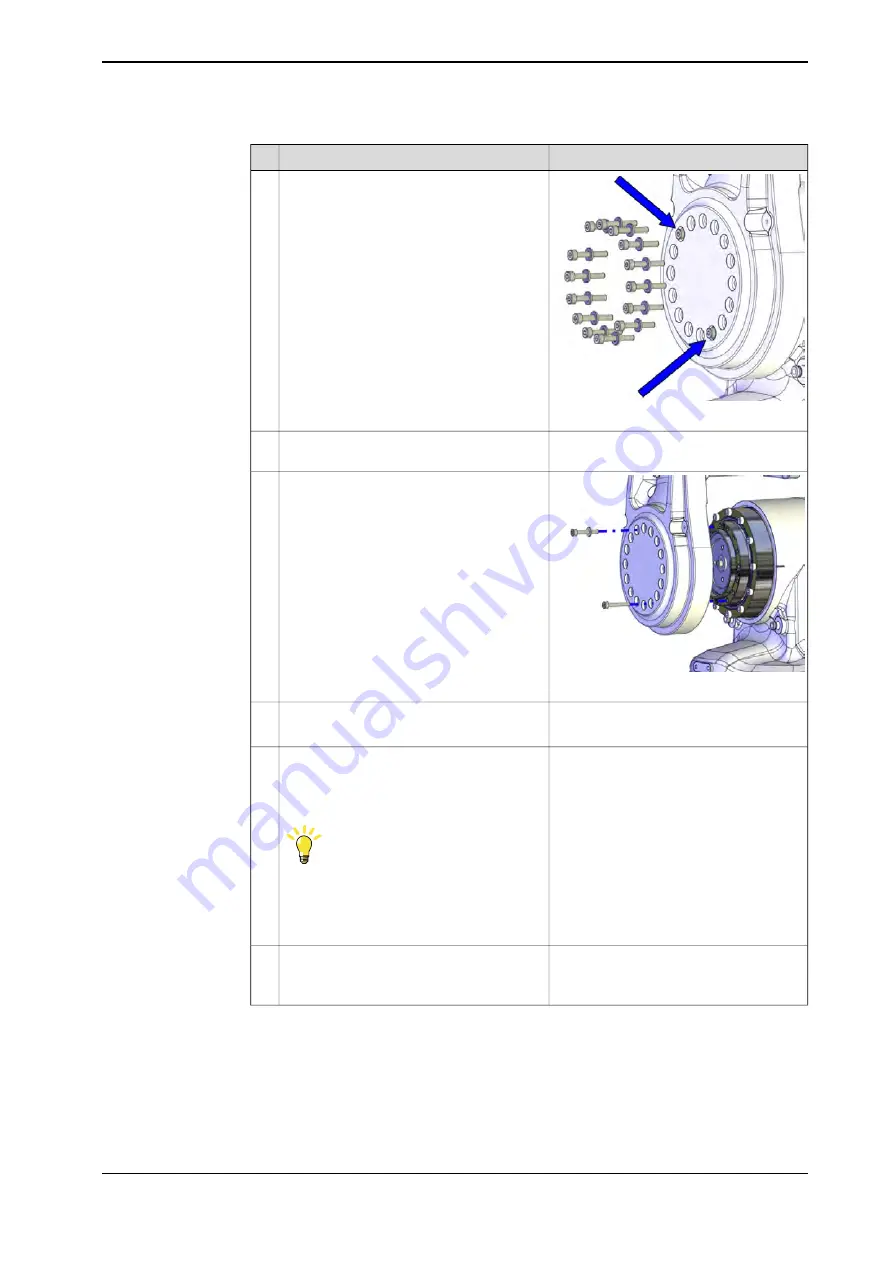
xx1300001121
Leave two attachment screws fitted and
unscrew the remaining screws, that secure
the lower arm to the axis-2 gearbox.
10
Take a hold of the upper and lower arm in
a firm grip.
11
xx1300001119
Use caution and unscrew the two remaining
attachment screws that secure the lower
arm to the axis-2 gearbox.
12
Air hole design:
13
Remove screw from swing plate.
Use caution and put the lower and upper
arms beside the swing housing and base,
making sure not to damage the cable har-
ness.
Tip
Place the armsystem on some plastic or in
a box with soft edges. The armsystem must
be placed in a way that it will not be able to
move or be moved.
14
Disconnect connectors:
•
R2.MP2
•
R2.ME2
15
Continues on next page
Product manual - IRB 120
195
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
4 Repair
4.7.2 Replacing axis-2 motor with gearbox
Continued
Summary of Contents for IRB 120
Page 1: ...ROBOTICS Product manual IRB 120 ...
Page 8: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 114: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 254: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 270: ......
Page 271: ......


































































