





























Information
Action
xx1300001119
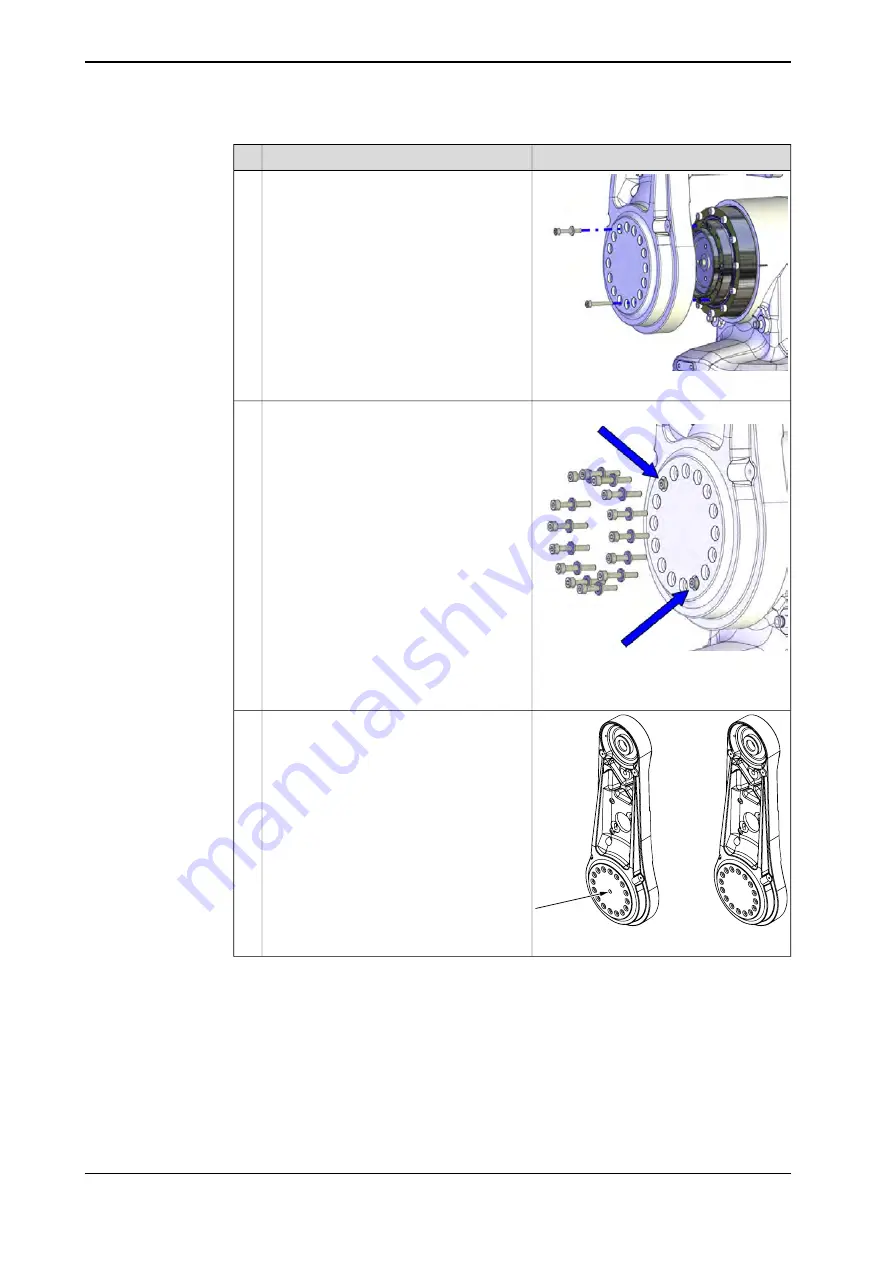
While holding the upper and lower arms,
secure the lower arm to the axis-2 motor
with gearbox with two of the attachment
screws.
11
Tightening torque: 4 Nm.
xx1300001121
Secure the axis-2 motor with gearbox to the
lower arm with the remaining attachment
screws. Tighten all screws.
12
Attachment screws M4x25 q12.9 and
washers (16 + 16 pcs)
xx1500000113
If the robot has an air release hole: Add
Loctite 243 and refit the screw in the air re-
lease hole on the lower arm housing.
13
Continues on next page
198
Product manual - IRB 120
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
4 Repair
4.7.2 Replacing axis-2 motor with gearbox
Continued
Summary of Contents for IRB 120
Page 1: ...ROBOTICS Product manual IRB 120 ...
Page 8: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 114: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 254: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 270: ......
Page 271: ......







































































