



























7 The robot performs a measurement sequence by rotating the axis back and
forth.
8 Remove the calibration tool and reinstall the protective cover on the fixed
pin and the protection plug in the bushing, if any.
Refit the dampers on axes 1, 2 and 3.
9 Choose whether to save the calibration data or not.
Calibration of the robot is not finished until the calibration data is saved, as last
step of the calibration procedure.
Preparation prior to calibration
The calibration procedure is described in the FlexPendant while conducting it.
Note
Action
DANGER
While conducting the calibration, the robot needs
to be connected to power.
Make sure that the robots working area is empty,
as the robot can make unpredictable movements.
1
CAUTION
For robots with protection type Clean Room:
Always cut the paint with a knife and grind the
paint edge when disassembling parts of the robot!
See
Replacing parts on the robot on page 118
2
Use a clean cloth.
Wipe the calibration tool clean.
Note
The calibration method is exact. Dust, dirt or color
flakes will affect the calibration value.
3
Continues on next page
238
Product manual - IRB 120
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
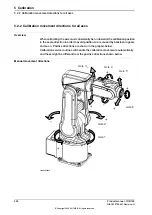
5 Calibration
5.4.2 Axis Calibration - Running the calibration procedure
Continued
Summary of Contents for IRB 120
Page 1: ...ROBOTICS Product manual IRB 120 ...
Page 8: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 114: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 254: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 270: ......
Page 271: ......

































































