



























1.4.3 DANGER - Make sure that the main power has been switched off!
Description
Working with high voltage is potentially lethal. Persons subjected to high voltage
may suffer cardiac arrest, burn injuries, or other severe injuries. To avoid these
dangers, do not proceed working before eliminating the danger as detailed below.
Elimination, IRC5 Single Cabinet Controller
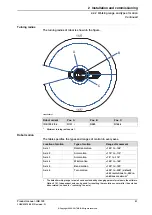
Note/illustration
Action
xx0600002782
Switch off the main switch on the controller
cabinet.
1
A: Main switch
Elimination, IRC5 Dual Cabinet Controller
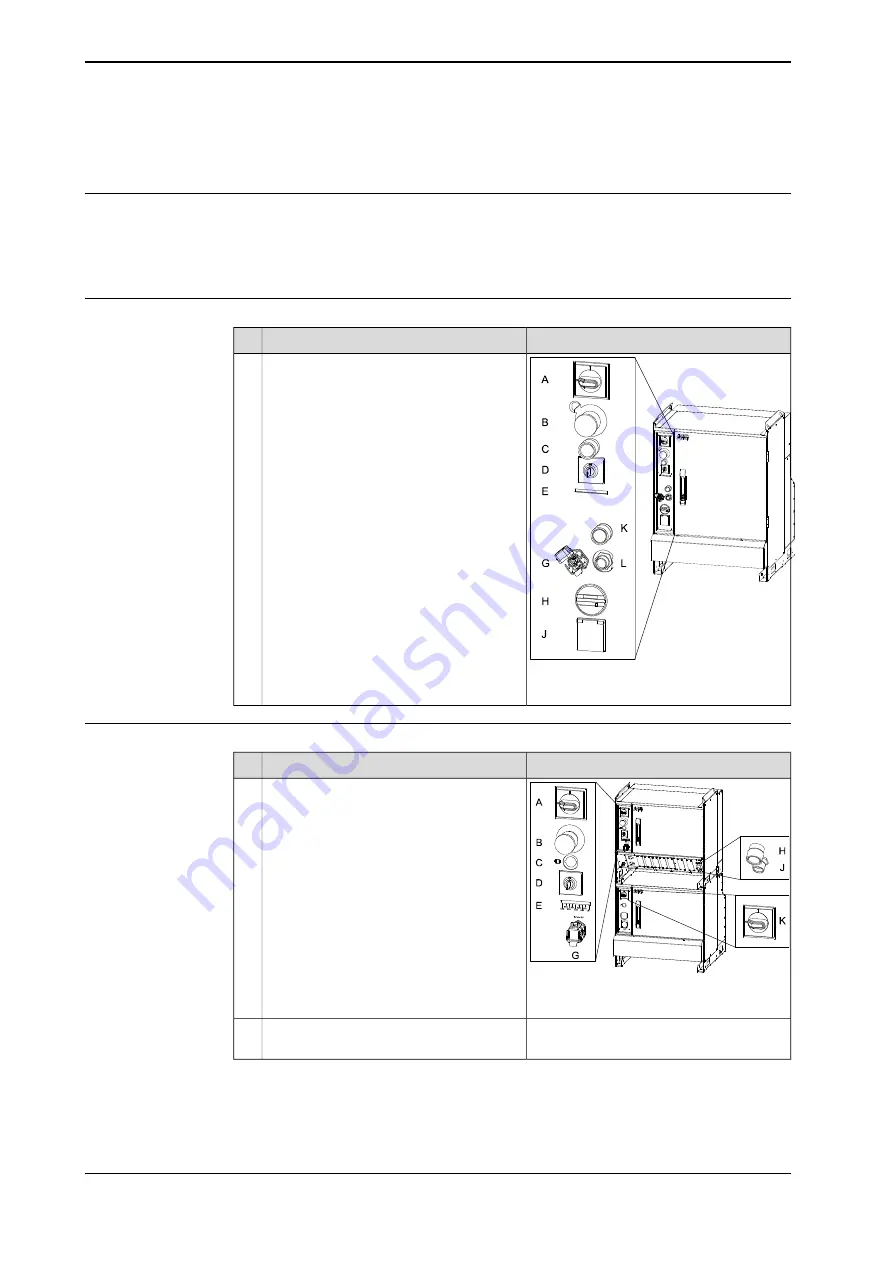
Note/illustration
Action
xx0600002783
Switch off the main switch on the Drive
Module.
1
K: Main switch, Drive Module
A: Main switch, Control Module
Switch off the main switch on the Control
Module.
2
Continues on next page
48
Product manual - IRB 120
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
1 Safety
1.4.3 DANGER - Make sure that the main power has been switched off!
Summary of Contents for IRB 120
Page 1: ...ROBOTICS Product manual IRB 120 ...
Page 8: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 114: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 254: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 270: ......
Page 271: ......







































































