






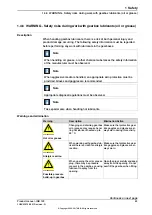



















2.2.2 Working range and type of motion
Working range
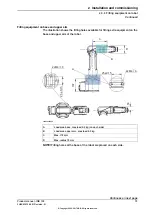
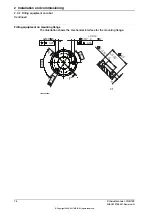
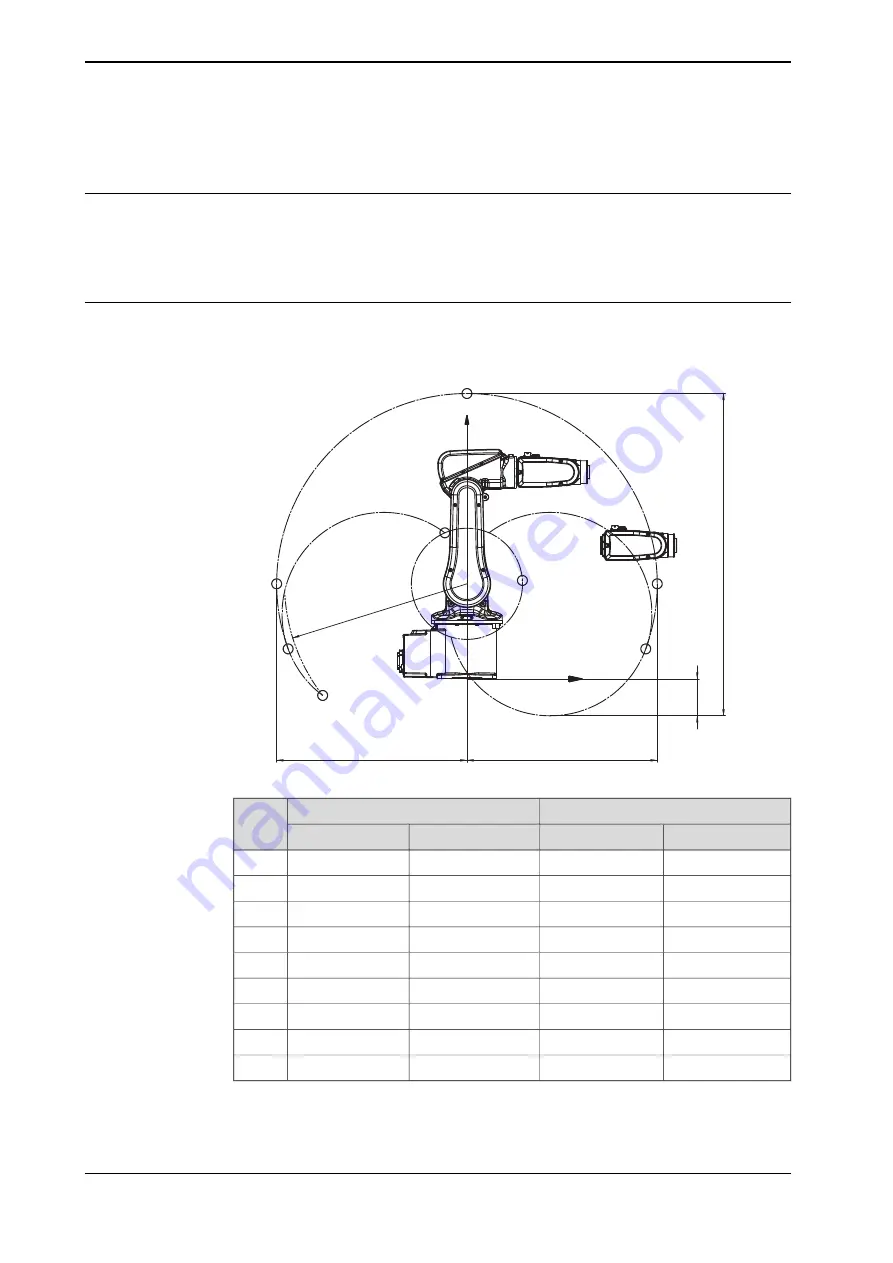
The figures show the working ranges of the robot.
The extreme positions of the robot arm are specified at the wrist center (dimensions
in mm).
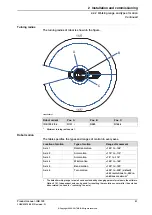
Working range
The illustration shows the unrestricted working range of the robot.
580
580
1
1
2
9
8
2
R 5
5
6,1
X
Pos 1
Pos 0
Pos 7
Pos 8
Pos 3
Pos 4
Pos 2
Pos 6
Pos 5
Z
xx0900000263
Angle (degrees)
Position at wrist center (mm)
Posi-
tion
Axis 3
Axis 2
Z
X
0°
0°
630 mm
302 mm
A
-77°
0°
870 mm
0 mm
B
+70°
0°
300 mm
169 mm
C
-77°
+90°
270 mm
580 mm
D
-77°
+110°
91 mm
545 mm
E
-110°
-110°
-50 mm
-440 mm
F
+70°
-110°
445 mm
-67 mm
G
-77°
-90°
270 mm
-580 mm
H
-77°
-110°
91 mm
-545 mm
J
Continues on next page
60
Product manual - IRB 120
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
2 Installation and commissioning
2.2.2 Working range and type of motion
Summary of Contents for IRB 120
Page 1: ...ROBOTICS Product manual IRB 120 ...
Page 8: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 114: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 254: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 270: ......
Page 271: ......






































































