





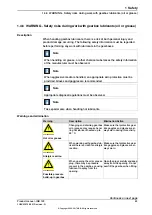




















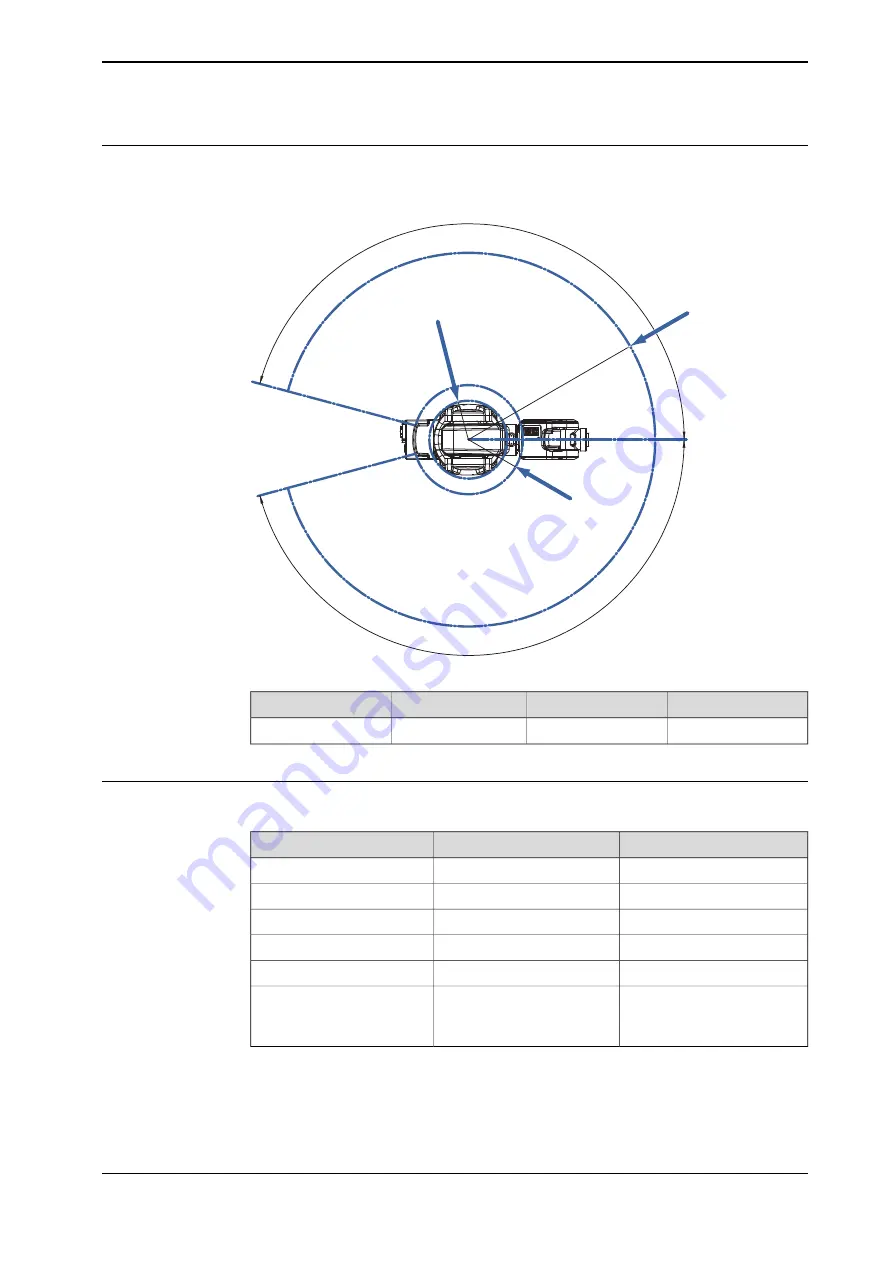
Turning radius
The turning radius of robot is shown in the figure.
A
B
C
165°
165°
xx0900000157
Pos. C
Pos. B
Pos. A
Robot variant
R169.4
R580
R121
i
IRB 120-3/0.6
i
Minimum turning radius axis 1.
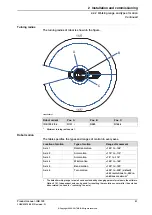
Robot motion
The table specifies the types and ranges of motion in every axes.
Range of movement
Type of motion
Location of motion
+165° to -165°
Rotation motion
Axis 1
+110° to -110°
Arm motion
Axis 2
+70° to -110°
Arm motion
Axis 3
+160° to -160°
Wrist motion
Axis 4
+120° to -120°
Bend motion
Axis 5
+400° to -400° (default)
Turn motion
Axis 6
+242 revolutions to -242 re-
volutions maximum
i
i
The default working range for axis 6 can be extended by changing parameter values in the software.
Option 610-1 Independent axis can be used for resetting the revolution counter after the axis has
been rotated (no need for "rewinding" the axis).
Product manual - IRB 120
61
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
2 Installation and commissioning
2.2.2 Working range and type of motion
Continued
Summary of Contents for IRB 120
Page 1: ...ROBOTICS Product manual IRB 120 ...
Page 8: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 114: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 254: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 270: ......
Page 271: ......






































































