











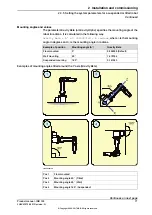















Mounting angles and values
The parameter
Gravity Beta
(or
Gravity Alpha
) specifies the mounting angle of the
robot in radians. It is calculated in the following way.
Gravity Beta = A° x 3.141593/180 = B radians
, where
A
is the mounting
angle in degrees and
B
is the mounting angle in radians.
Gravity Beta
Mounting angle (A°)
Example of position
0.000000 (Default)
0°
Floor mounted
1.570796
90°
Wall mounting
3.141593
180°
Suspended mounting
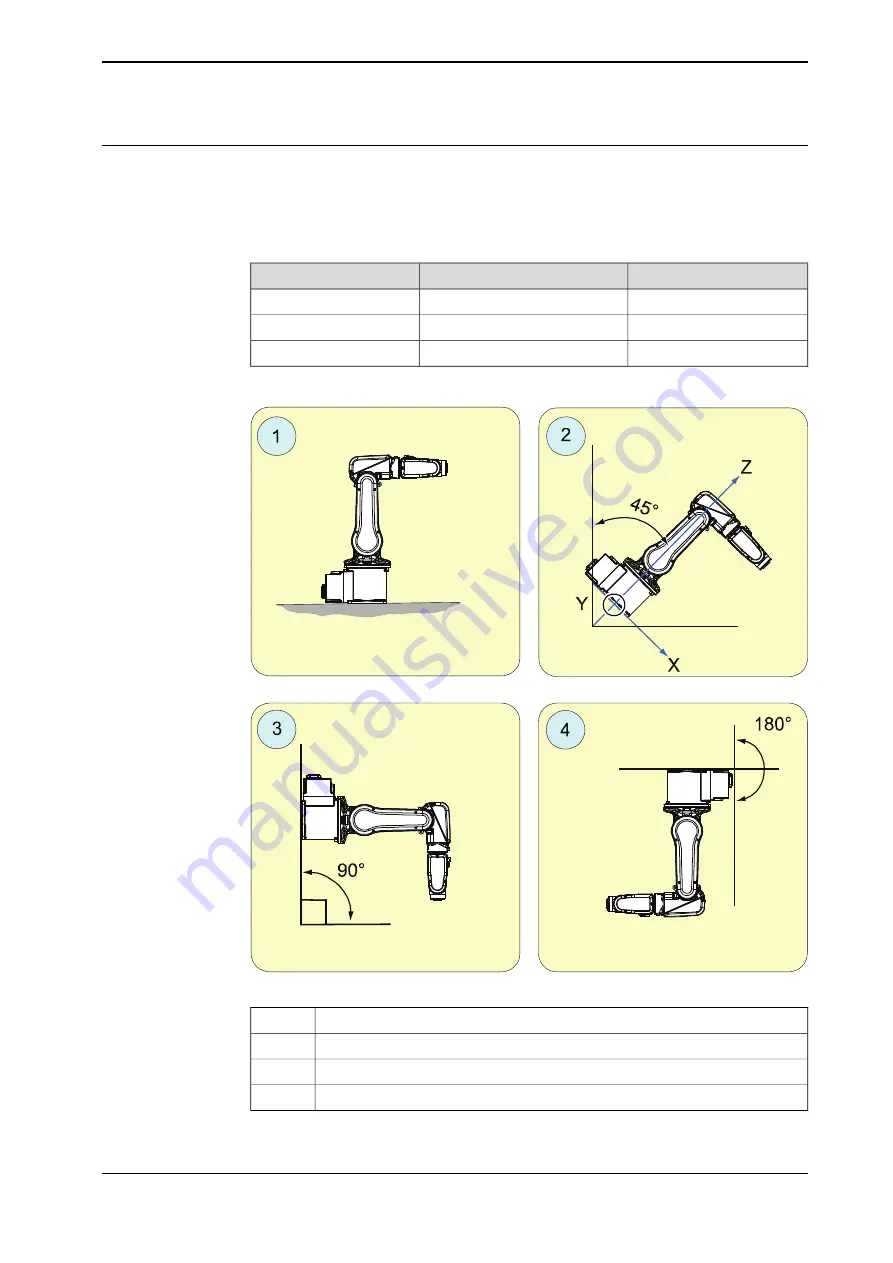
Examples of mounting angles tilted around the Y axis (
Gravity Beta
)
xx1000000126
Floor mounted
Pos 1
Mounting angle 45° (Tilted)
Pos 2
Mounting angle 90° (Wall)
Pos 3
Mounting angle 180° (Suspended)
Pos 4
Continues on next page
Product manual - IRB 120
77
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
2 Installation and commissioning
2.3.5 Setting the system parameters for a suspended or tilted robot
Continued
Summary of Contents for IRB 120
Page 1: ...ROBOTICS Product manual IRB 120 ...
Page 8: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 114: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 254: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 270: ......
Page 271: ......



































































