



























5.5 Calibrating with manual calibration method
Introduction
This section describes how to calibrate the robot manually and how to use the
calibration pins when calibrating.
Note
Calibration can be done in the following ways:
•
axis 1, 2 and 3 at the same time using the FlexPendant
•
axis 4, 5 and 6 at the same time using the FlexPendant
•
each axis separately.
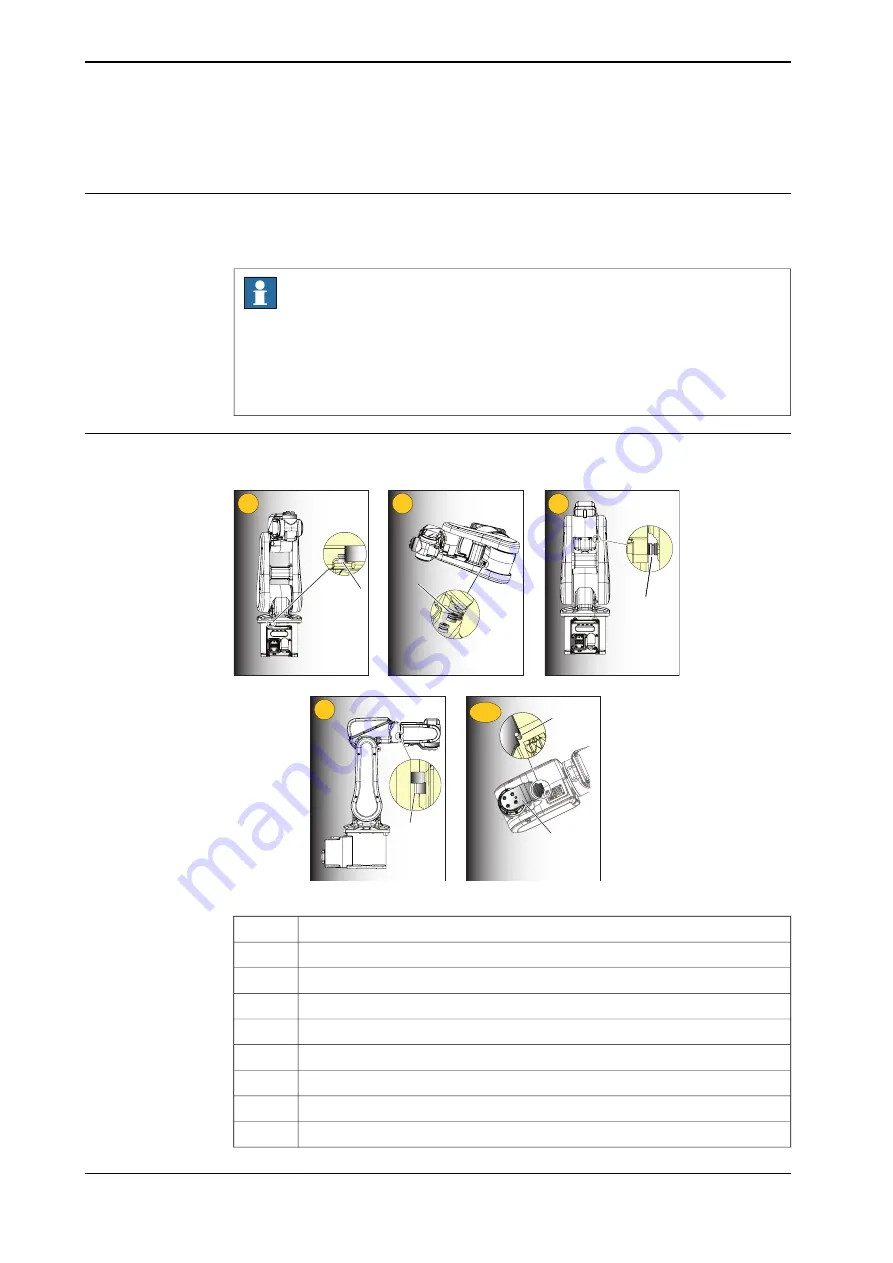
Location of calibration pins
The figure shows the position of the calibration pins on axes 1 - 6.
A
B
1
2
3
4
5-6
C
D
E
F
xx0900000627
Calibration, axis 1. (Rotate axis 1 -170.2°)
1
Calibration pins, axis 1
A
Calibration, axis 2. (Rotate axis 2 -115.1°)
2
Calibration pins, axis 2
B
Calibration, axis 3. (Rotate axis 3 75.8°)
3
Calibration pins, axis 3
C
Calibration, axis 4. (Rotate axis 4 -174.7°)
4
Calibration pins, axis 4
D
Calibration, axis 5-6. (Rotate axis 5 -90° and axis 6 90°)
5-6
Continues on next page
242
Product manual - IRB 120
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
5 Calibration
5.5 Calibrating with manual calibration method
Summary of Contents for IRB 120
Page 1: ...ROBOTICS Product manual IRB 120 ...
Page 8: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 114: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 254: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 270: ......
Page 271: ......







































































