




























5.6 Verifying the calibration
Introduction
Always verify the results after calibrating
any
robot axis to verify that all calibration
positions are correct.
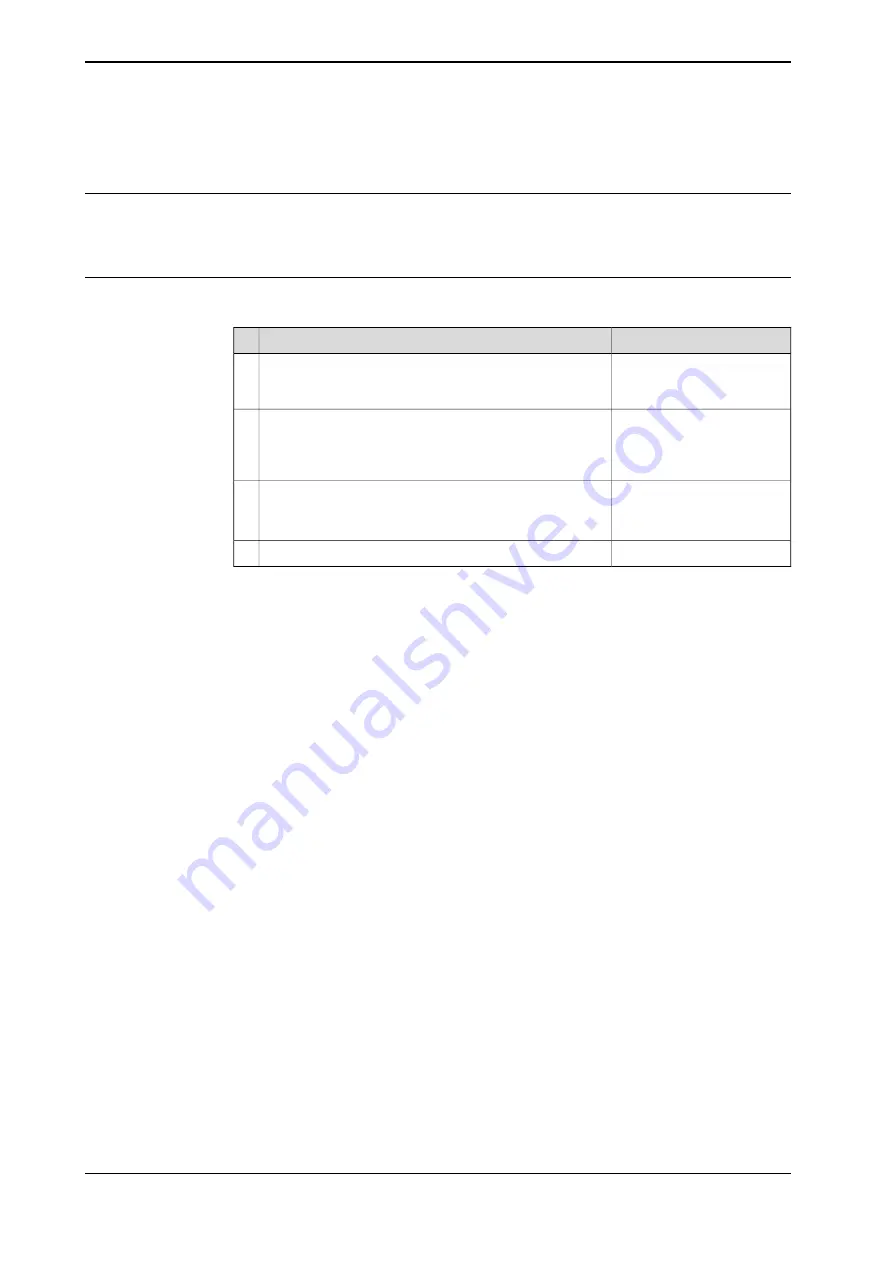
Verifying the calibration
Use this procedure to verify the calibration result.
Note
Action
See
Run the calibration home position program twice.
Do not change the position of the robot axes after running
the program!
1
This is detailed in section
Synchronization marks and
synchronization position for
axes on page 228
Adjust the
synchronization marks
when the calibration is
done, if necessary.
2
Write down the values on a new label and stick it on top
of the calibration label.
3
xx
Remove any calibration equipment from the robot.
4
248
Product manual - IRB 120
3HAC035728-001 Revision: N
© Copyright 2009-2017 ABB. All rights reserved.
5 Calibration
5.6 Verifying the calibration
Summary of Contents for IRB 120
Page 1: ...ROBOTICS Product manual IRB 120 ...
Page 8: ...This page is intentionally left blank ...
Page 90: ...This page is intentionally left blank ...
Page 114: ...This page is intentionally left blank ...
Page 224: ...This page is intentionally left blank ...
Page 250: ...This page is intentionally left blank ...
Page 254: ...This page is intentionally left blank ...
Page 264: ...This page is intentionally left blank ...
Page 270: ......
Page 271: ......







































































