



























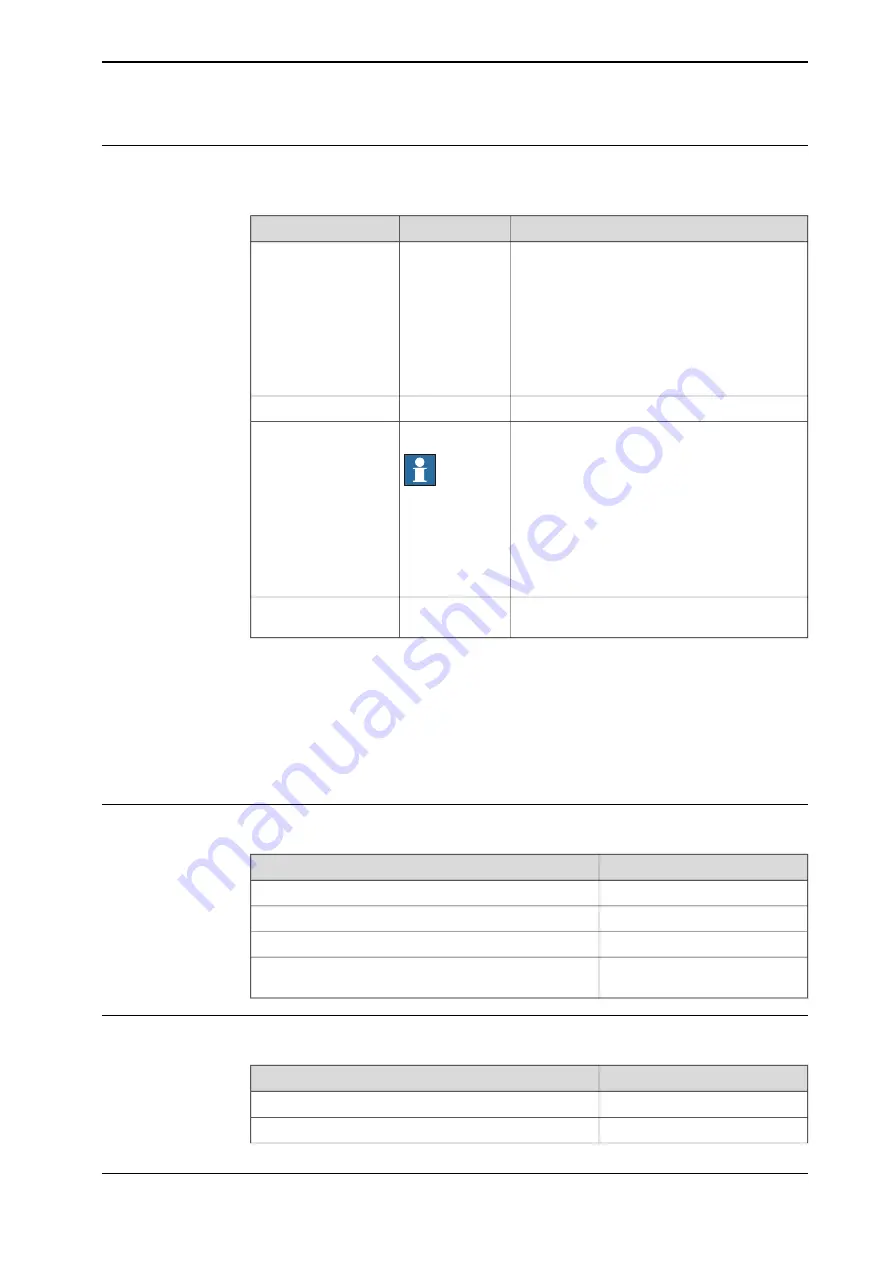
Requirements, foundation
The table shows the requirements for the foundation where the weight of the
installed robot is included:
Note
Value
Requirement
Flat foundations give better repeatability of the
resolver calibration compared to original settings
on delivery from ABB.
0.1/500 mm
Flatness of foundation
surface
The value for levelness aims at the circumstance
of the anchoring points in the robot base.
In order to compensate for an uneven surface,
the robot can be recalibrated during installation.
If resolver/encoder calibration is changed this
will influence the absolute accuracy.
5°
Maximum tilt
The value is recommended for optimal perform-
ance.
22 Hz
Note
It may affect the
manipulator life-
time to have a
lower resonance
frequency than
recommended.
Minimum resonance
frequency
Due to foundation stiffness, consider robot mass
including equipment.
i
For information about compensating for founda-
tion flexibility, see
Application manual - Control-
ler software OmniCore
, section
Motion Process
Mode
.
150 MPa
Minimum foundation
material yield strength
i
The minimum resonance frequency given should be interpreted as the frequency of the robot
mass/inertia, robot assumed stiff, when a foundation translational/torsional elasticity is added, i.e.,
the stiffness of the pedestal where the robot is mounted. The minimum resonance frequency should
not be interpreted as the resonance frequency of the building, floor etc. For example, if the equivalent
mass of the floor is very high, it will not affect robot movement, even if the frequency is well below
the stated frequency. The robot should be mounted as rigid as possibly to the floor.
Disturbances from other machinery will affect the robot and the tool accuracy. The robot has
resonance frequencies in the region 10 – 20 Hz and disturbances in this region will be amplified,
although somewhat damped by the servo control. This might be a problem, depending on the
requirements from the applications. If this is a problem, the robot needs to be isolated from the
environment.
Storage conditions, robot
The table shows the allowed storage conditions for the robot:
Value
Parameter
-25°C (-13°F)
Minimum ambient temperature
+55°C (+131°F)
Maximum ambient temperature
+70°C (+158°F)
Maximum ambient temperature (less than 24 hrs)
95% at constant temperature
(gaseous only)
Maximum ambient humidity
Operating conditions, robot
The table shows the allowed operating conditions for the robot:
Value
Parameter
+5°C
i
(41°F)
Minimum ambient temperature
+45°C (113°F)
Maximum ambient temperature
Continues on next page
Product manual - IRB 1300
39
3HAC070390-001 Revision: G
© Copyright 2020-2022 ABB. All rights reserved.
2 Technical data
2.1 Technical data
Continued
Summary of Contents for IRB 1300
Page 1: ...ROBOTICS Product manual IRB 1300 ...
Page 8: ...This page is intentionally left blank ...
Page 36: ...This page is intentionally left blank ...
Page 100: ...This page is intentionally left blank ...
Page 746: ...This page is intentionally left blank ...
Page 762: ...This page is intentionally left blank ...
Page 764: ...This page is intentionally left blank ...
Page 768: ......
Page 769: ......































































