




























Lifting the robot with roundslings
Use this procedure to lift the robot with roundslings .
Note
Action
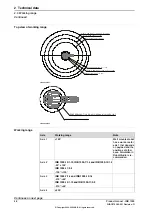
25°
50°
25°
xx1900001576
Valid for IRB 1300-11/0.9
Jog the robot to the specified position:
•
Axis 1: 0°
•
Axis 2: -25°
•
Axis 3: 65°
•
Axis 4: 0°
•
Axis 5: 50°
•
Axis 6: 0°
WARNING
The robot is mechanically unstable if not se-
cured to the foundation.
1
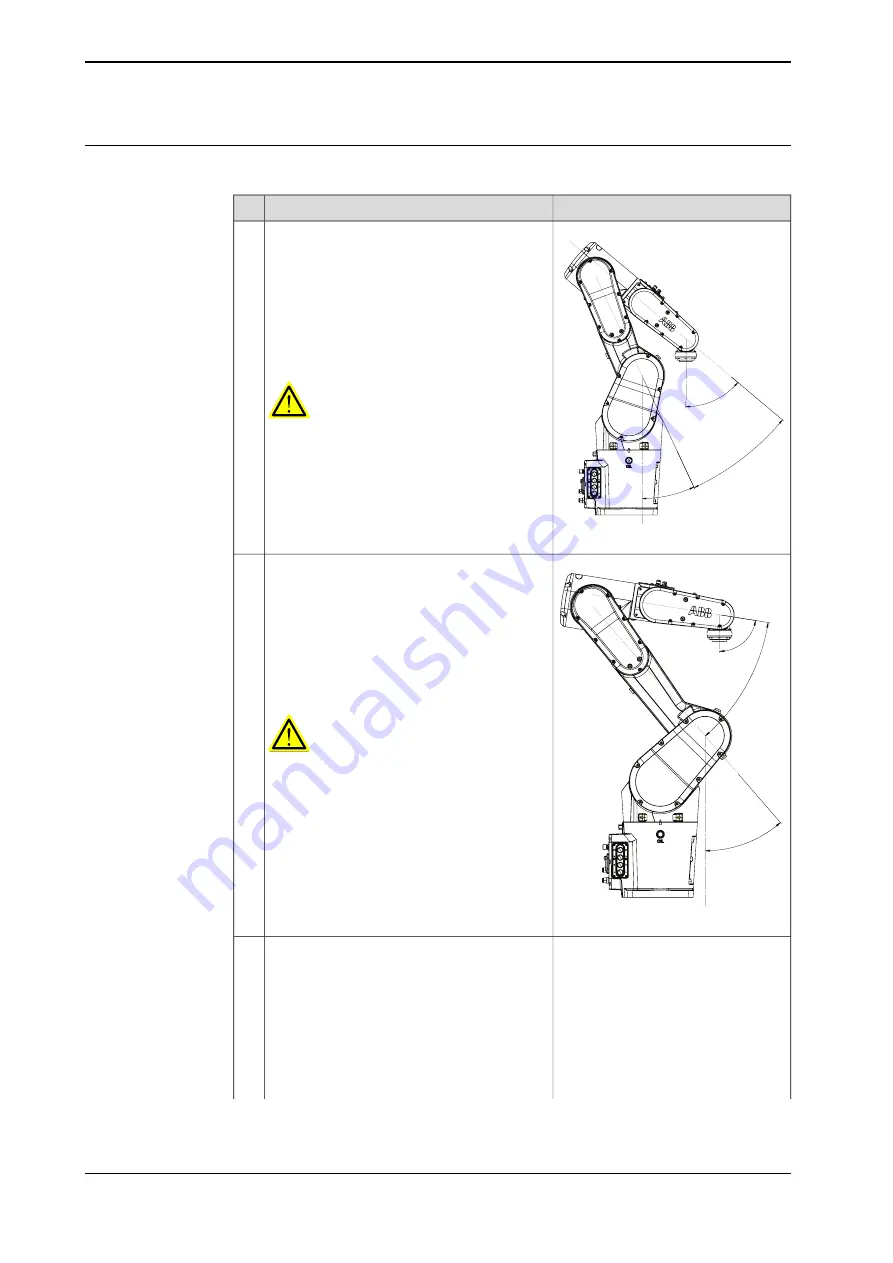
41°
40°
81°
xx1900001577
Valid for IRB 1300-10/1.15
Jog the robot to the specified position:
•
Axis 1: 0°
•
Axis 2: -41°
•
Axis 3: 50°
•
Axis 4: 0°
•
Axis 5: 81°
•
Axis 6: 0°
WARNING
The robot is mechanically unstable if not se-
cured to the foundation.
2
Valid for IRB 1300-7/1.4 and IRB 1300-12/1.4
3
Jog the robot to the specified position:
•
Axis 1: 0°
•
Axis 2: -52°
•
Axis 3: 69°
•
Axis 4: 0°
•
Axis 5: 73°
•
Axis 6: 0°
Continues on next page
60
Product manual - IRB 1300
3HAC070390-001 Revision: G
© Copyright 2020-2022 ABB. All rights reserved.
3 Installation and commissioning
3.3.1.1 Lifting the robot with roundslings
Continued
Summary of Contents for IRB 1300
Page 1: ...ROBOTICS Product manual IRB 1300 ...
Page 8: ...This page is intentionally left blank ...
Page 36: ...This page is intentionally left blank ...
Page 100: ...This page is intentionally left blank ...
Page 746: ...This page is intentionally left blank ...
Page 762: ...This page is intentionally left blank ...
Page 764: ...This page is intentionally left blank ...
Page 768: ......
Page 769: ......







































































