




























These axes are marked with
Unrestricted
in the FlexPendant window. Also the
following table shows the dependencies between the axes.
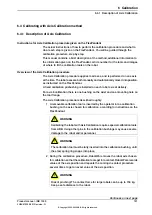
Requirements for axis positioning during calibration
Axis to calibrate
Axis 6
Axis 5
Axis 4
Axis 3
Axis 2
Axis 1
Required
position of
axis
*
*
*
*
*
-
Axis 1
*
*
*
0
-
0
Axis 2
*
*
*
-
0
0
Axis 3
*
*
-
*
*
*
Axis 4
X
-
*
*
*
*
Axis 5
-
*
*
*
*
*
Axis 6
Axis to be calibrated
-
Unrestricted. Axis is allowed to be jogged to other position than 0 degrees.
*
Axis must be put in position 0 degrees.
0
Special requirement
X
System containing SafeMove
SafeMove will lose its synchronization to the controller if a new calibration is done.
New calibration values have to be downloaded to SafeMove, and a new SafeMove
calibration has to be done. Make sure that the user rights admit to change the
safety settings and to synchronize SafeMove.
How to calibrate a suspended or wall mounted robot
The IRB 1300 is fine calibrated floor standing in factory, prior to shipping.
To calibrate a suspended or wall mounted robot, reference calibration could be
used. Reference values for a suspended or a wall mounted robot must be created
with the robot mounted at its working position, not standing on a floor.
To calibrate a suspended or wall mounted robot with the fine calibration routine,
the robot must first be taken down and mounted standing on the floor.
Product manual - IRB 1300
723
3HAC070390-001 Revision: G
© Copyright 2020-2022 ABB. All rights reserved.
6 Calibration
6.4.1 Description of Axis Calibration
Continued
Summary of Contents for IRB 1300
Page 1: ...ROBOTICS Product manual IRB 1300 ...
Page 8: ...This page is intentionally left blank ...
Page 36: ...This page is intentionally left blank ...
Page 100: ...This page is intentionally left blank ...
Page 746: ...This page is intentionally left blank ...
Page 762: ...This page is intentionally left blank ...
Page 764: ...This page is intentionally left blank ...
Page 768: ......
Page 769: ......







































































