





























7.5 Motor temperature too high
Description
The robot stops and the motor temperature for joint arg is too high.
Consequences
It is not possible to continue until the motor has cooled down. The system goes to
Motors Off.
Possible causes
The symptom can be caused by:
•
The values for payload and arm load are not consistent with the actual ones.
•
The value for ambient temperature setting in the controller is not consistent
with the actual operating temperature environment.
•
The user program may contain too much high acceleration and deceleration
of the joint.
•
Gravity torque or external forces for the joint can also be too high.
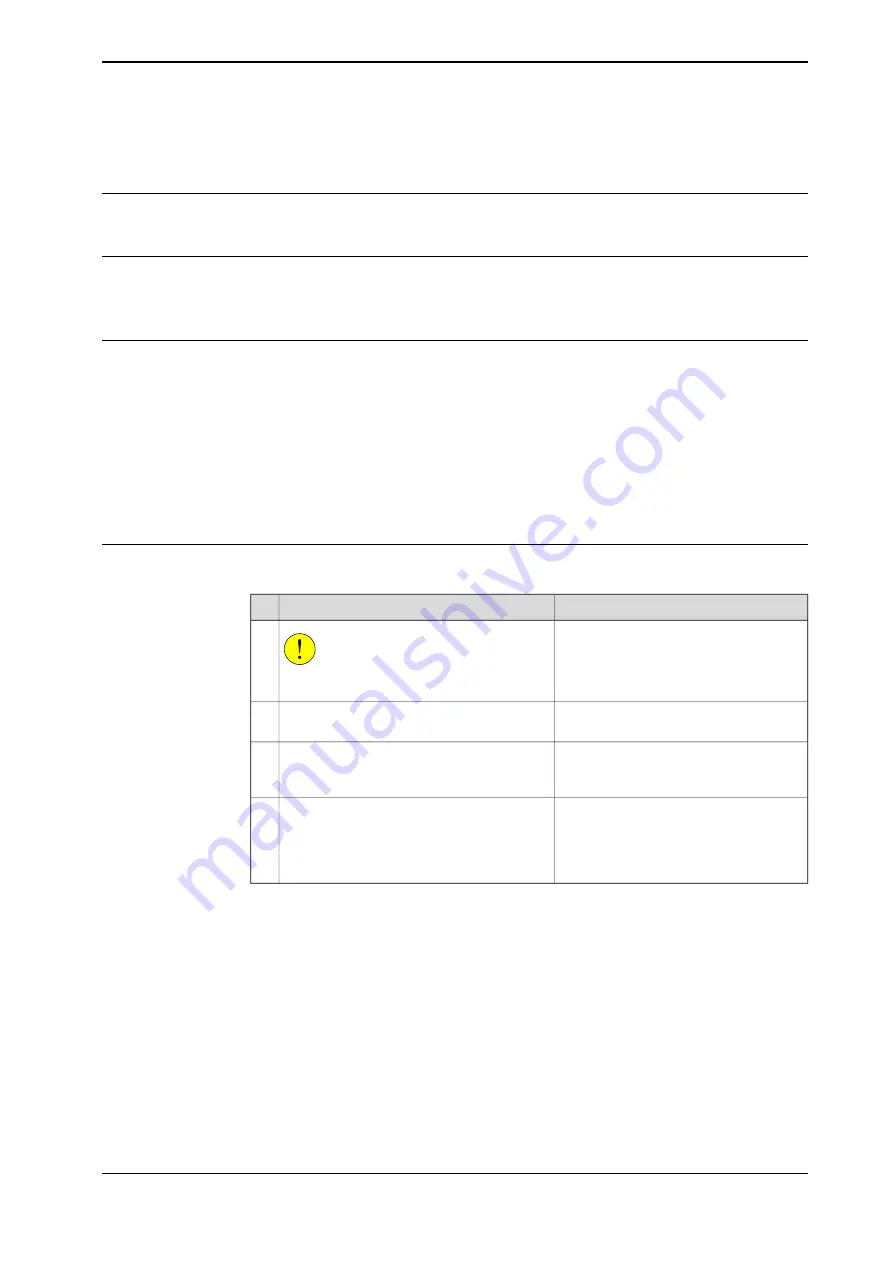
Recommended actions
The following actions are recommended:
Information
Action
CAUTION
Allow hot parts to cool down.
1
Verify that the values for payload and arm
load are set correctly.
2
Verify that the value for ambient temperature
setting in the controller is consistent with the
actual operating temperature environment.
3
The ways could be but not limited to op-
timizing robot movement cycle, adjusting
acc, dec as well as external force, adding
wait time, and introducing alternative
path/RAPID, etc.
Rewrite the user program to reduce the mo-
tor utilization.
4
Product manual - IRB 1300
745
3HAC070390-001 Revision: G
© Copyright 2020-2022 ABB. All rights reserved.
7 Troubleshooting
7.5 Motor temperature too high
Summary of Contents for IRB 1300
Page 1: ...ROBOTICS Product manual IRB 1300 ...
Page 8: ...This page is intentionally left blank ...
Page 36: ...This page is intentionally left blank ...
Page 100: ...This page is intentionally left blank ...
Page 746: ...This page is intentionally left blank ...
Page 762: ...This page is intentionally left blank ...
Page 764: ...This page is intentionally left blank ...
Page 768: ......
Page 769: ......







































































