




























Grounding and bonding point on manipulator
There is a grounding/bonding point on the manipulator base. The grounding/bonding
point is used for potential equalizing between control cabinet, manipulator and any
peripheral devices.
xx1700000097
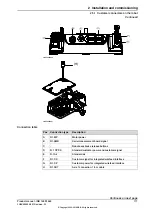
Position switch cables, robot base to controller (option)
The cable is delivered in one length only and should be wound to suitable length.
Cabling between robot base and controller
Connection
point, cabinet
Connection
point, robot
Art. no.
Cable
XS8
R1.LS
3HAC7997-4
Position switch cable, axis 1, 30 m
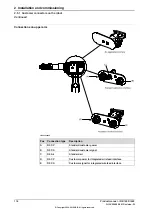
Customer cables (option)
The customer cables specified below are connected between robot and controller.
The customer cables are ordered according to current protection class of the robot.
Customer cables for robots with standard protection
Connection
point, robot
Art. no.
Cable (standard)
R1.CP/CS
3HAC3353-1
Customer cable, power-signal, 7 m
R1.CP/CS
3HAC3354-1
Customer cable, power-signal, 15 m
R1.CP/CS
3HAC3355-1
Customer cable, power-signal, 22 m
R1.CP/CS
3HAC3356-1
Customer cable, power-signal, 30 m
Continues on next page
Product manual - IRB 1600/1660
121
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
2 Installation and commissioning
2.5.2 Robot cabling and connection points
Continued
Summary of Contents for IRB 1600
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......

































































