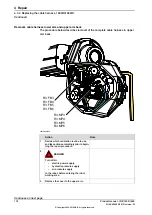





























4.4.2 Replacing the complete upper arm, IRB 1600ID/1660ID
Note
Recalibration of robot axis 3-6 is required after replacement of upper arm.
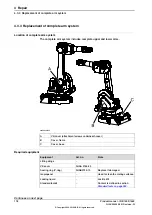
Location of the complete upper arm
The complete upper arm is considered a spare part, including wrist, gearboxes
and motors. The figure below shows the location of the upper arm and connection
to the lower arm.
xx0700000045
VK -Cover
A
Socket head cap screw M10x40
B
Cable harness
C
V-ring
D
Continues on next page
188
Product manual - IRB 1600/1660
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.4.2 Replacing the complete upper arm, IRB 1600ID/1660ID
Summary of Contents for IRB 1600
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......






































































