



























Note
Action
xx1700000117
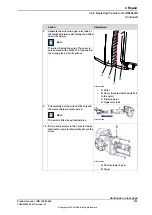
With the new spare part wrist there is a
parallel pin enclosed.
The parallel pin must be installed on the
wrist if the robot is calibrated with the
Axis Calibration method.
If the calibration method is unknown,
look at the tubular shaft interface. If it
has an elongated hole, install the parallel
pin into the wrist, according to the next
step.
4
xx1700000118
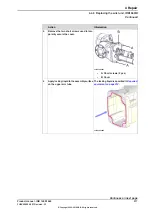
If the robot is calibrated with Axis Calib-
ration. fit the parallel pin into the corres-
ponding hole in the wrist.
Note
If the parallel pin is not installed on a ro-
bot calibrated with Axis Calibration, the
calibration result will be affected negat-
ively.
5
Verify that the parallel pin sticks out from the
wrist according to the measurement given
below.
6 ±0,5
xx1700000119
Art. no. is specified in section
Lightly lubricate the o-ring sealingplate
with
grease
.
6
Connect to connector R3.MP5 or 6:
•
+: pin 7
•
-: pin 8
In order to release the brake, connect
the 24 VDC power supply to motors:
7
Use a new o-ring! Spare part no. is specified
in
Required equipment on page 201
.
Fit the
o-ring sealingplate
to the upper
arm. Fit the
wrist unit
to the upper arm
with the three attachment screws, while
making sure that the gears mate prop-
erly.
8
3 pcs, M8 x 25, tightening torque: 28 Nm.
Continues on next page
204
Product manual - IRB 1600/1660
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.4.4 Replacing the wrist unit, IRB 1600
Continued
Summary of Contents for IRB 1600
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......







































































