




























Note
Action
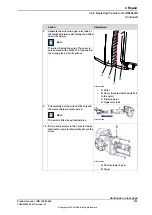
Shown as (H) in figure
Use standard tools to refit the three hexagon
socket head screw (M8x35).
4
Tightening torque 24 Nm
Note
When reconnecting the connectors
R4.FB6 and R4.MP6, make sure to push
the connectors towards the wrist as far
away from the axis 5-6 cable spiral as
possible, to avoid grease to accumulate
on the resolver connector.
Reconnect connectors R4.FB6 and R4.MP6,
through the hole for the VK cover.
5
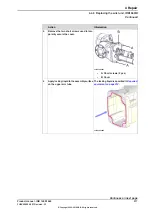
Shown as (E) in figure
Tighten the hexagon socket head screw
M5X16 (Short head).
6
Tightening torque 6 Nm
Refit the VK cover.
7
xx0700000092
Tightening the plug (A).
Tightening torque 6 Nm
8
Shown in
Refit the AW equipment in the upper arm.
9
Pendulum Calibration is described in
Operating manual - Calibration Pendulum
,
enclosed with the calibration tools.
Recalibrate the robot.
10
Axis Calibration is described in
ing with Axis Calibration method on
page 349
.
General calibration information is included
in section
DANGER
Make sure all safety requirements are met
when performing the first test run. These are
further detailed in section
cause injury or damage on page 28
11
Product manual - IRB 1600/1660
211
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.4.5 Replacing the wrist unit, IRB 1600ID
Continued
Summary of Contents for IRB 1600
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......







































































