



























The guiding sleeves are absolutely needed if the robot is wall or angle mounted,
or if the robot is calibrated with AbsAcc.
Orienting and securing the robot to installation site
Note
Action
Make sure the installation site for the robot
conforms to the specifications in section
installation procedure on page 50
.
1
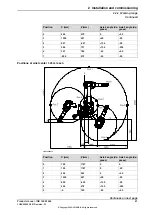
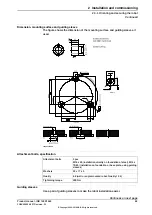
Hole configuration of the base is shown
in the figure
Prepare the installation site with attachment
holes.
If the robot is calibrated with AbsAcc, it must
be installed using guiding sleeves.
2
Dimension of mounting surface and the
guiding sleeves are shown in the figure
Dimension, mounting surface and
guiding sleeve on page 69
Detailed in section
Lift the robot to the installation site.
3
Guide the robot gently using two of the attach-
ment bolts while lowering it into its mounting
position.
4
Specified in section
.
Fit and tighten the
bolts and washers
in the
base attachment holes.
5
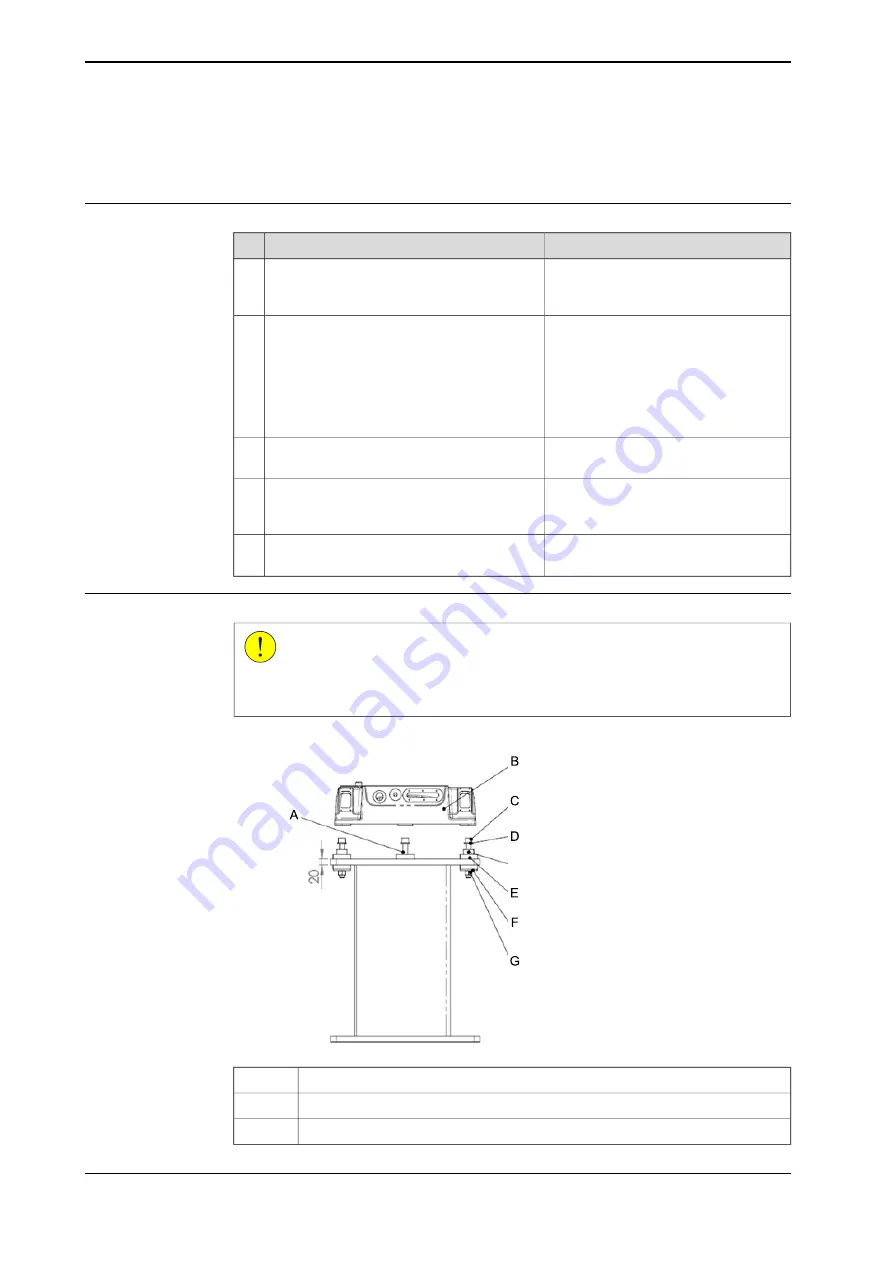
Isolating AW manipulator
CAUTION
If the manipulator is used for arc welding and is mounted on a pedestal, make
sure that the manipulator is isolated from the pedestal with isolators.
Attachment point, front (no guide sleeve)
A
Manipulator base
B
Screw M16x120
C
Continues on next page
70
Product manual - IRB 1600/1660
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
2 Installation and commissioning
2.3.4 Orienting and securing the robot
Continued
Summary of Contents for IRB 1600
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......
































































