




























Note
Action
xx0700000091
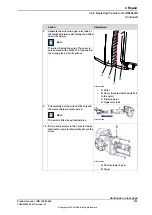
Remove the three screws, hexagon socket
head screw M5x25 (E) securing the motor
axis 6 and remove the motor (C).
10
A: Contact R4.FB6
B: Contact R4.MP6
C: Motor axis 6
D: Hexagon socket head screw
M8x35
F: Hexagon socket head screw
M5x25
Refitting the wrist unit
Use this procedure to refit the complete wrist unit.
Note
Action
xx0700000353
Note
Remove the console from the old motor and
scrap it.
The new console shall be fitted to the axis-6
motor. See .
1
A Hex socket head cap screw M5x25
B Motor Console
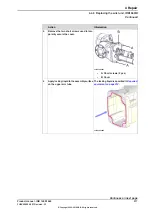
Apply a string or similar to the cable harness
and run it out through the hole for the VK
cover.
2
xx0700000093
Carefully fit the wrist (with motor axis 6 fitted)
to the upper arm tube, using the string to pull
the cable harness back through the hole for
the VK cover.
3
A: String
Continues on next page
210
Product manual - IRB 1600/1660
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
4 Repair
4.4.5 Replacing the wrist unit, IRB 1600ID
Continued
Summary of Contents for IRB 1600
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......







































































