





























5.7 Checking the synchronization position
Introduction
Check the synchronization position of the robot before beginning any programming
of the robot system. This may be done:
•
Using a
MoveAbsJ
instruction with argument zero on all axes.
•
Using the
Jogging
window on the FlexPendant.
Using a
MoveAbsJ
instruction
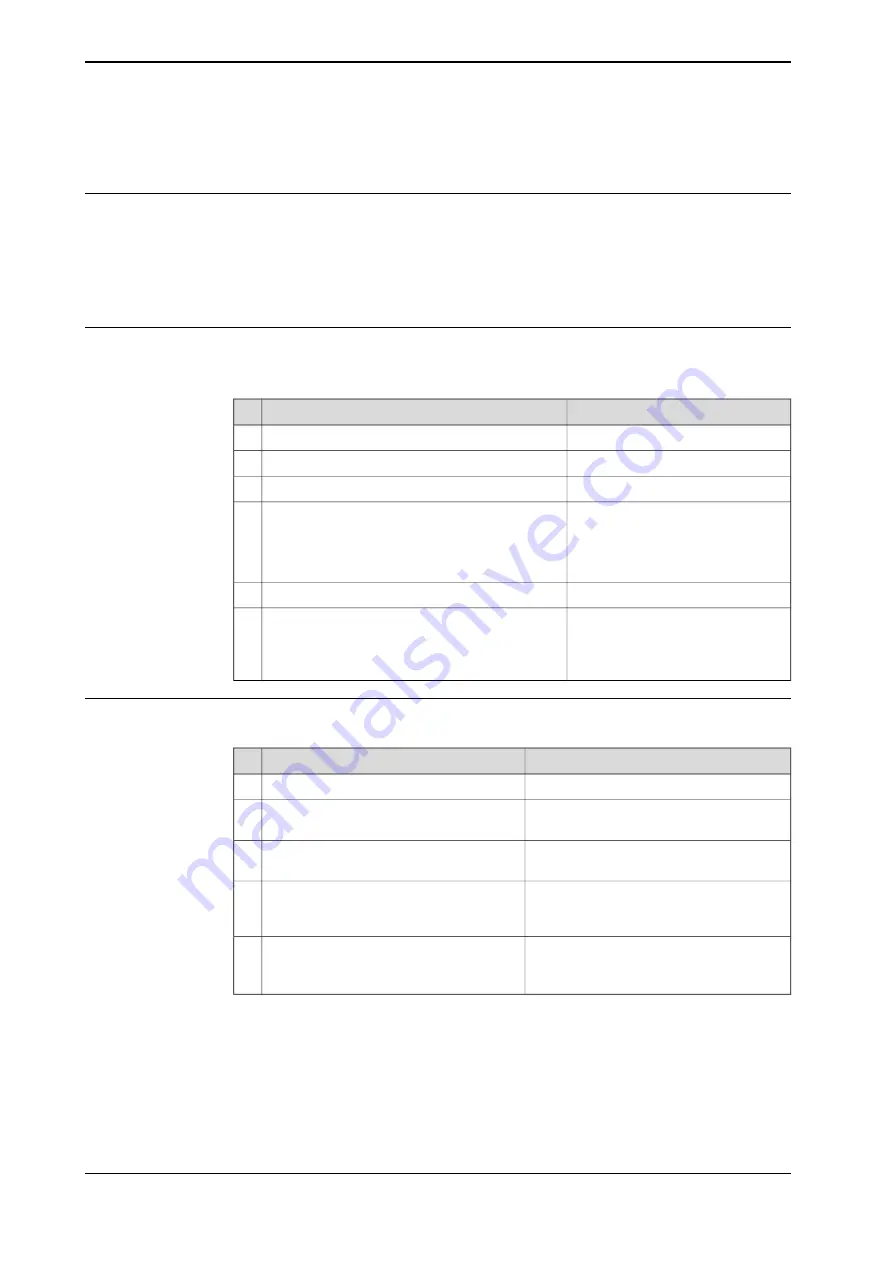
Use this procedure to create a program that runs all the robot axes to their
synchronization position.
Note
Action
On ABB menu tap
Program editor
.
1
Create a new program.
2
Use
MoveAbsJ
in the
Motion&Proc
menu.
3
Create the following program:
MoveAbsJ [[0,0,0,0,0,0],
[9E9,9E9,9E9,9E9,9E9,9E9]]
\NoEOffs, v1000, fine, tool0
4
Run the program in manual mode.
5
See
synchronization position for axes on
page 341
and
Check that the synchronization marks for the axes
align correctly. If they do not, update the revolu-
tion counters.
6
Using the jogging window
Use this procedure to jog the robot to the synchronization position of all axes.
Note
Action
On the
ABB
menu, tap
Jogging
.
1
Tap
Motion mode
to select group of axes
to jog.
2
Tap to select the axis to jog, axis 1, 2, or
3.
3
Manually run the robots axes to a position
where the axis position value read on the
FlexPendant, is equal to zero.
4
See
Synchronization marks and synchron-
ization position for axes on page 341
and
Updating revolution counters on page 345
Check that the synchronization marks for
the axes align correctly. If they do not, up-
date the revolution counters.
5
368
Product manual - IRB 1600/1660
3HAC026660-001 Revision: W
© Copyright 2006-2018 ABB. All rights reserved.
5 Calibration
5.7 Checking the synchronization position
Summary of Contents for IRB 1600
Page 1: ...ROBOTICS Product manual IRB 1600 1660 ...
Page 8: ...This page is intentionally left blank ...
Page 18: ...This page is intentionally left blank ...
Page 48: ...This page is intentionally left blank ...
Page 152: ...This page is intentionally left blank ...
Page 336: ...This page is intentionally left blank ...
Page 372: ...This page is intentionally left blank ...
Page 388: ...This page is intentionally left blank ...
Page 396: ......
Page 397: ......





































































