


























The information in this document is subject to change without notice and should not be construed as a
commitment by ABB Robotics Porducts AB. ABB Robotics Products AB assumes no responsibility for any
errors that may appear in this document.
In no event shall ABB RoboticsProducts AB be liable for incidental or consequential damages arising from
use of this document or of the software and hardware described in this document.
This document and parts thereof must not be reproduced or copied without ABB Robotics Products AB's —v
written permission, and the contents thereof must not be imparted to a third party nor be used for any
unauthorized purpose. Contravention will be prosecuted.
Additional copies of this document may be obtained from ABB Robotics Products AB at its then current
charge.
© ABB Robotics Products AB 1993
Article number: 3HAB 0003-8
Issue: January 1993
ABB Robotics Products AB
S-721 68 Vasteras
Sweden
Summary of Contents for IRB 2000
Page 8: ...Description 1KB 2000 ...
Page 10: ...Description 1KB 2000 ...
Page 12: ...Description 1KB 2000 6 ...
Page 20: ...Description 1KB 2000 14 ...
Page 32: ...Description 1KB 2000 26 ...
Page 40: ...5 3 2 Dimensional drawings Description 34 1KB 2000 ...
Page 41: ..._200 _D D_ Description 35 1KB 2000 ...
Page 44: ...Description 1KB 2000 38 ...
Page 64: ...Description 1KB 2000 58 ...
Page 77: ...Safety 1KB 2000 IBB 3000 12 1KB 3200 1KB 6000 ...
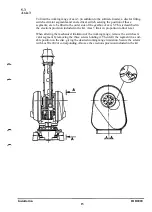
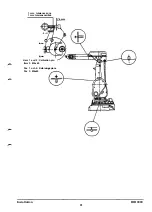
Page 80: ...Installation H B 2000 ...
Page 82: ...Installation 1KB 2000 ...
Page 91: ...Installation 1KB 2000 12 ...
Page 95: ...Installation 1KB 2000 16 ...
Page 110: ...INSTALLATION S3 0 4 ...
Page 112: ...INSTALLATION S3 1 2 ...
Page 160: ...INSTALLATION 3 46 ...
Page 234: ...INSTALLATION 5 70 ...
Page 262: ...INSTALLATION S3 7 6 ...







































































