





























4 Repair
4.3.1. Replacement of cable unit, axes 1-3
3HAC022031-001 Revision: C
84
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
Refitting, cable unit, axes 1-3
The procedure below details how to refit the cabling of axes 1-3 to the robot.
11. Remove the cover of the motors 1-3.
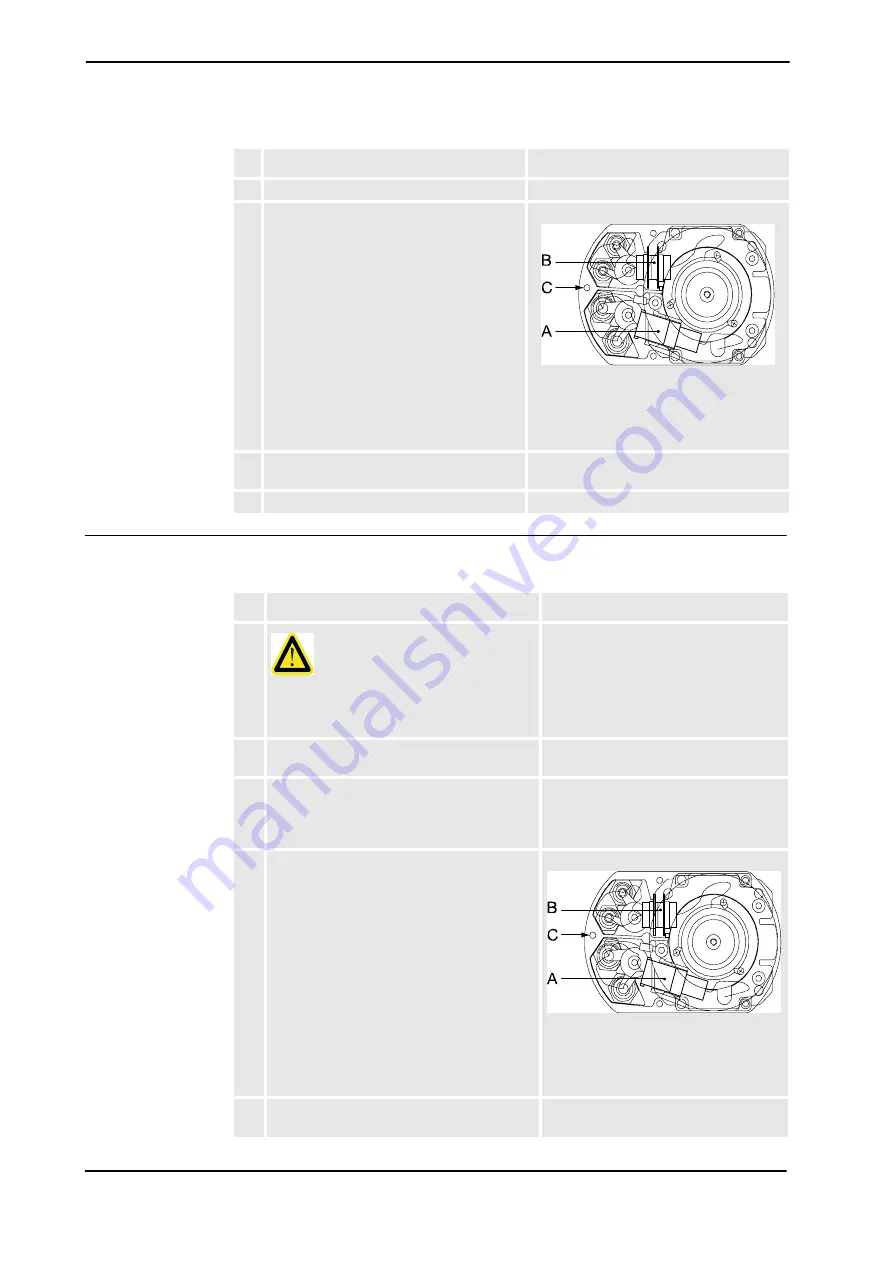
12. Disconnect all the connectors at the motors
of axes 1, 2 and 3.
xx0200000401
A. R3.MP1-3
B. R3.FB1-3
C. Connection box
13. Remove the three screws of the connection
box for the motors of axes 1, 2 and 3.
14. Gently pull the cable harness out.
Action
Note/Illustration
Action
Note/Illustration
1.
DANGER!
Turn off all electric power, hydraulic and
pneumatic pressure supplies to the robot!
2. Gently pull down the cable harness through
the center hole of axis 1.
3. Fit a new
gasket
and fit the connection box on
motor 1, 2 and 3, using the three attachment
screws.
The gasket is included in the spare part
of the cable unit, spare part no. is
specified in
4. Reconnect all the connectors at motors 1, 2
and 3.
xx0200000401
A. R3.MP1-3
B. R3.FB1-3
C. Connection box
5. Refit the cover of the motors, axes 1, 2 and 3,
with the five attachment screws.
Continued
Continues on next page
Summary of Contents for IRB 2400/10
Page 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Page 191: ......
Page 192: ......
Page 193: ......
Page 194: ......
Page 195: ......
Page 198: ......
Page 199: ......
Page 202: ......
Page 203: ......
Page 205: ......
Page 226: ......


































































