





























5 Calibration information
5.6. Checking the calibration position
169
3HAC022031-001 Revision: C
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
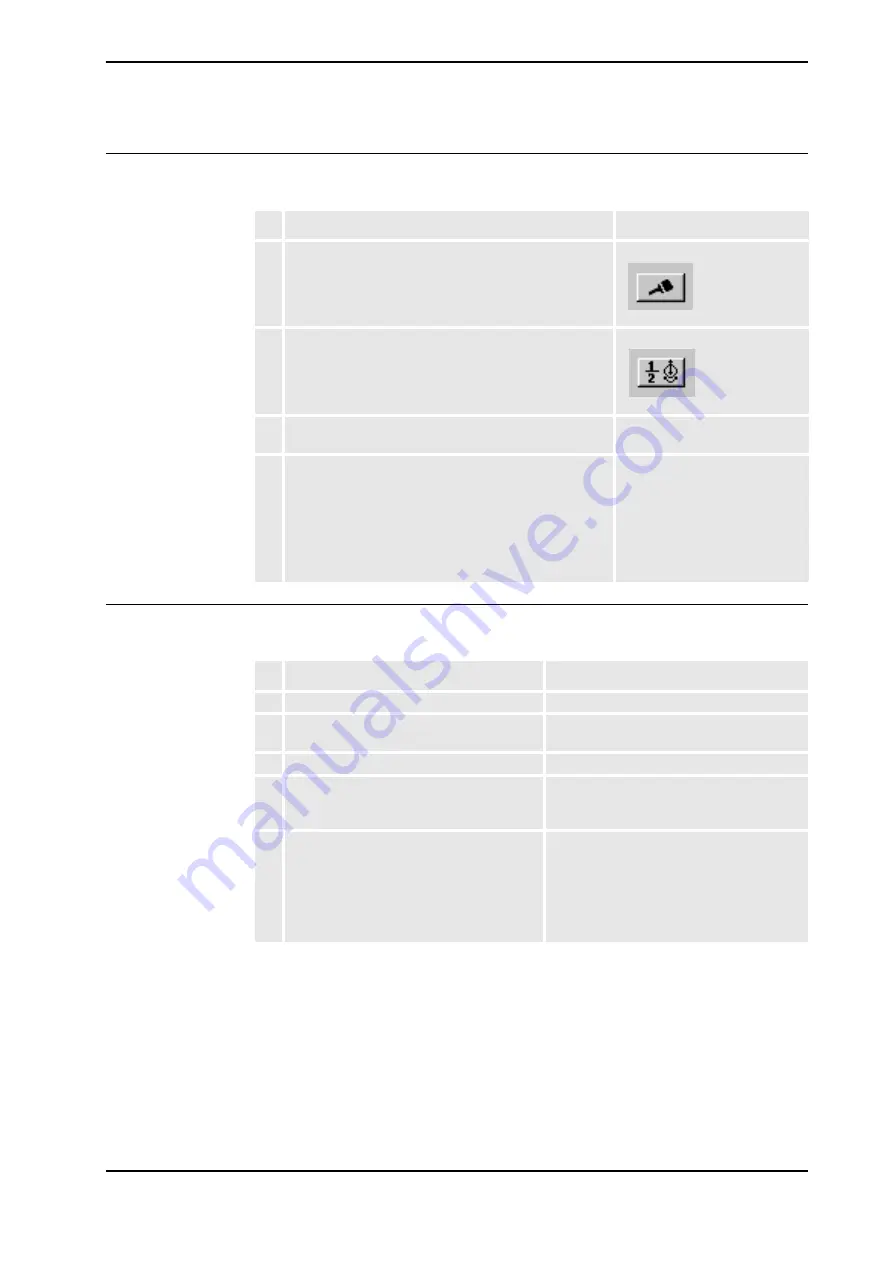
Using the Jogging window on the TPU, S4Cplus
This section describes how to jog the robot to all axes zero position.
Using the Jogging window on the FlexPendant, IRC5
This section describes how to jog the robot to all axes zero position.
Action
Illustration/Note
1. Open the Jogging window.
xx0100000195
2. Choose running axes-by-axes.
xx0100000196
3. Manually run the robot axes to a position where the
axis position value read on the TPU, is equal to zero.
4. Check that the
calibration marks
for the axes align
correctly. If they do not,
update the revolution counters
!
The calibration marks are
shown in section
scales and correct axis position
on page 162
Detailed in section
revolution counters on page
164
Action
Note
1. Tap Jogging in the ABB menu.
2. Tap Motion mode to choose group of axes
to jog.
3. Tap axis 1-3 to jog axis 1, 2, or 3.
4. Manually run the robots axes to a position
where the axis position value read on the
FlexPendant, is equal to zero.
5. Check that the calibration marks for the
axes align correctly. If they do not, update
the revolution counters!
The calibration marks are shown in section
Calibration scales and correct axis position
on page 162
.
How to update the counters is detailed in
section
Updating revolution counters on
.
Continued
Continues on next page
Summary of Contents for IRB 2400/L
Page 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Page 191: ......
Page 192: ......
Page 193: ......
Page 194: ......
Page 195: ......
Page 198: ......
Page 199: ......
Page 202: ......
Page 203: ......
Page 205: ......
Page 226: ......































































