

























2 Installation and commissioning
2.2.2. Working range
3HAC022031-001 Revision: C
42
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
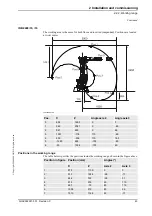
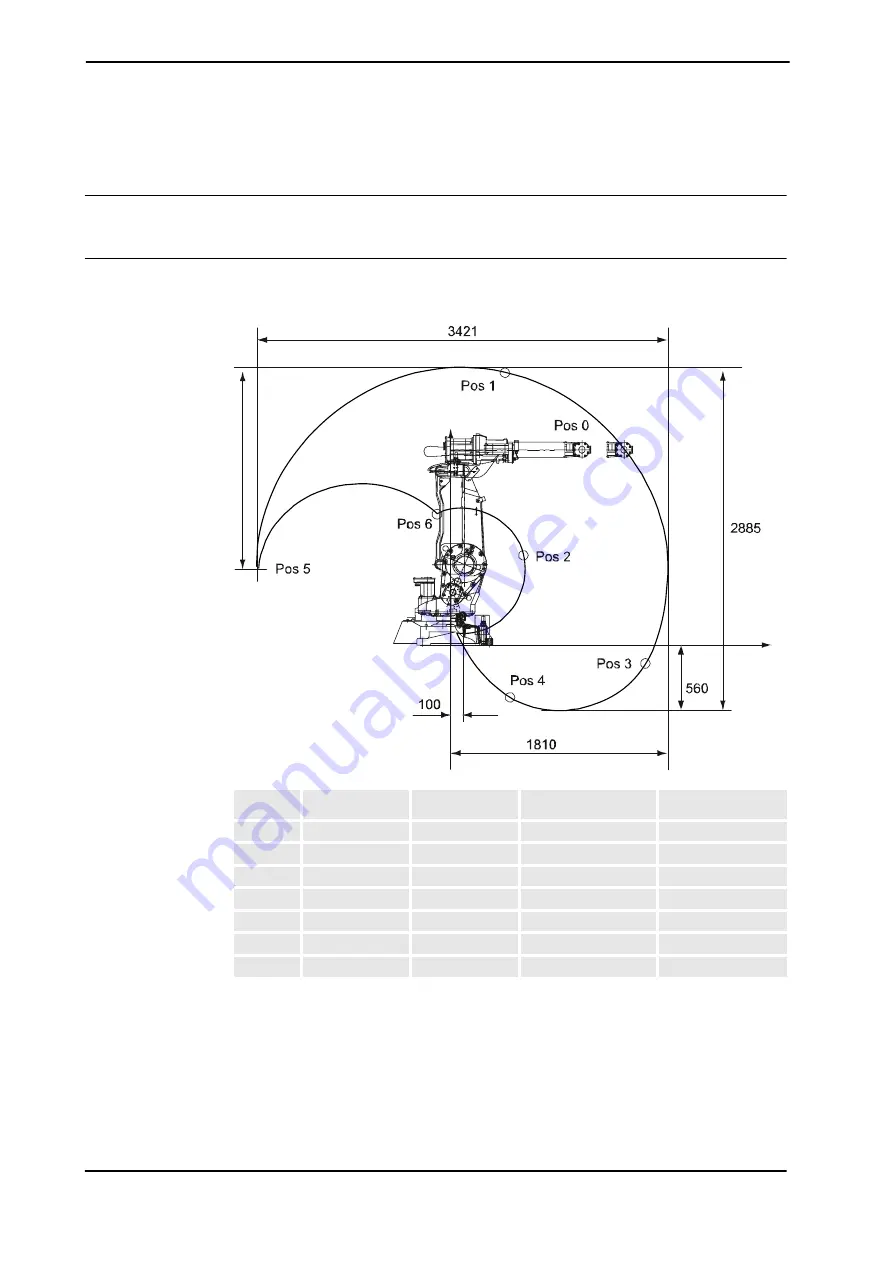
2.2.2. Working range
Working range
This section specifies the working areas of the robot models.
IRB 2400/L
The working area is the same for both floor and inverted (suspended). Positions are located
at wrist center.
xx0200000159
Pos.
X
Z
Angle axis 2
Angle axis 3
0
970
1620
0
0
1
404
2298
0
-60
2
602
745
0
65
3
1577
-246
110
-60
4
400
-403
110
24.5
5
-1611
623
-100
-60
6
-115
1088
-100
65
Continues on next page
Summary of Contents for IRB 2400/L
Page 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Page 191: ......
Page 192: ......
Page 193: ......
Page 194: ......
Page 195: ......
Page 198: ......
Page 199: ......
Page 202: ......
Page 203: ......
Page 205: ......
Page 226: ......


































































