





























4 Repair
4.3.2. Replacement of cable harness, axes 4-6
87
3HAC022031-001 Revision: C
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
4.3.2. Replacement of cable harness, axes 4-6
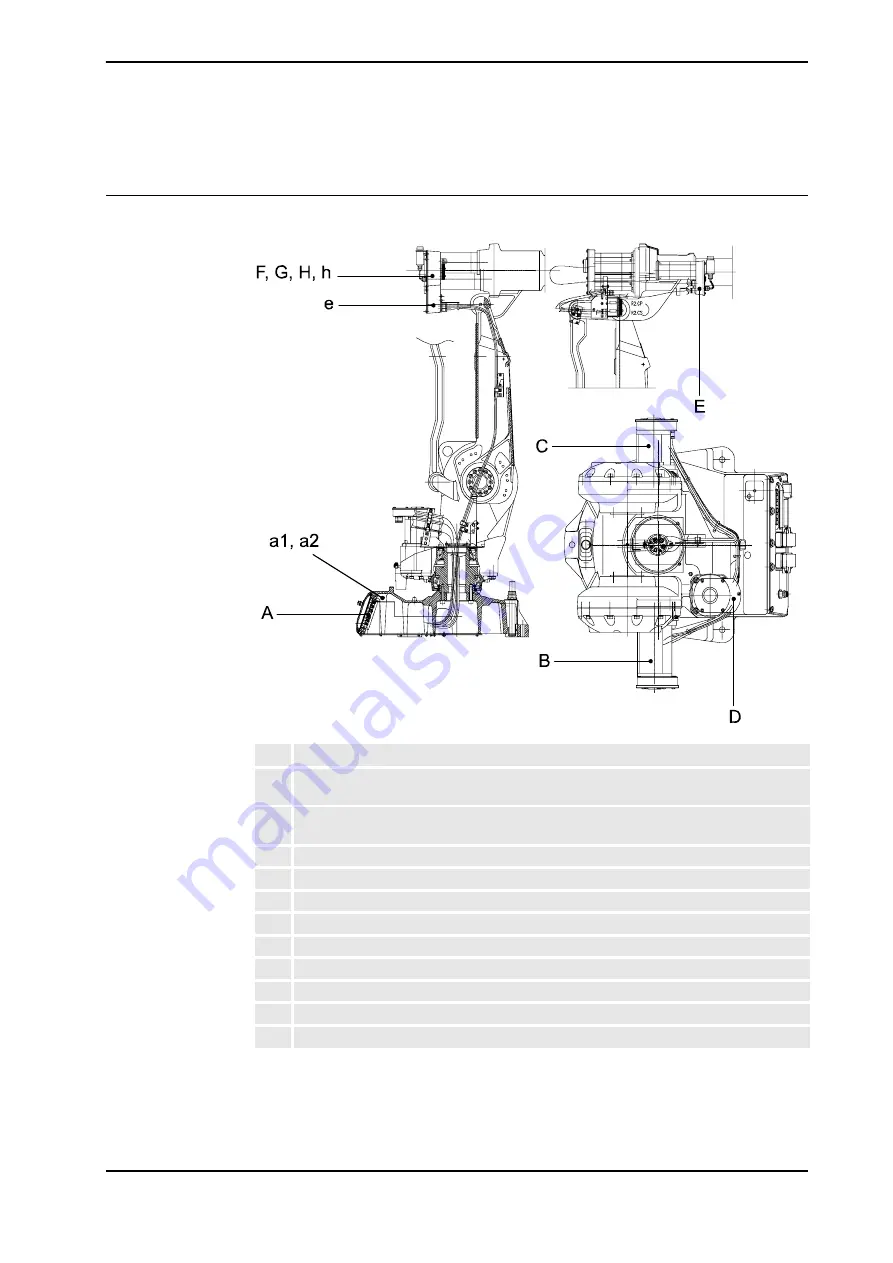
Location of cable harness
The cable harness runs throughout the robot as shown in the figure below.
xx0200000396
A
Connector at robot base, R1.MP, R1.SMB and R1.C/CS
a1
Electrical connectors rear of the cover plate at the robot base , R1.MP1-3, R1.MP4-6,
R1.CS, R1.CP, R1.H1, R2.BU, R2.BU1-3, R2.BU4-6,
a2
Connectors at the serial mesurement board (SMB-unit), R2.SMB1-2 (empty), R2.G
(bat), R2.FB1-3 and R2.FB4-6
B
Connectors at motor 2, R3.MP2 and R3.FB2
C
Connectors at motor 3, R3.MP3, R3.FB3,R3.LS1 and R3.LS2
D
Connectors at motor 1, R3.MP1, R3.FB1
E
Connectors at motor 4 (5 kg option), R3.MP4 and R3.FB4
e
Connectors at motor 4 (15 kg option), R3.MP4 and R3.FB4
F
Connectors at motor 5, R3.MP5 and R3.FB5
G
Connectors at motor 6, R3.MP6 and R3.FB6
H
Connectors R3.H1 and R3.H2 (5 kg option)
h
Connectors R3.H1 and R3.H2 (15 kg option)
Continues on next page
Summary of Contents for IRB 2400/L
Page 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Page 191: ......
Page 192: ......
Page 193: ......
Page 194: ......
Page 195: ......
Page 198: ......
Page 199: ......
Page 202: ......
Page 203: ......
Page 205: ......
Page 226: ......







































































