





























4 Repair
4.7.2. Replacement of motor, axis 2
3HAC022031-001 Revision: C
128
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
Required equipment
Note!
The different motors are not compatible. Make sure to replace with correct model!
Removal, motor axis 2
The procedure below details how to remove the motor, axis 2.
Equipment, etc.
Spare part no.
Art. no.
Note
Motor, axis 2
3HAC4790-1
(Elmo)
Motor, axis 2
3HAC021350-001
(Yaskawa)
O-ring
3HAB 3772-1
Always fit a new one!
Gasket
3HAB 3676-1
Measuring tool, motor
3HAB7887-1
Power supply
24 VDC, max. 1.5 A. For
releasing the brakes.
Standard toolkit
The content is defined in
section
.
Calibration Pendulum
toolkit
3HAC15716-1
Complete kit that also
includes operating
manual.
Other tools and procedures
may be required. See
references to these
procedures in the step-by-
step instructions below.
These procedures include
references to the tools
required.
Circuit Diagram
See chapter
Circuit
diagram
.
Action
Note/Illustration
1.
DANGER!
Turn off all electric power, hydraulic and pneumatic
pressure supplies to the robot!
2. Remove the
cover
of the connection box.
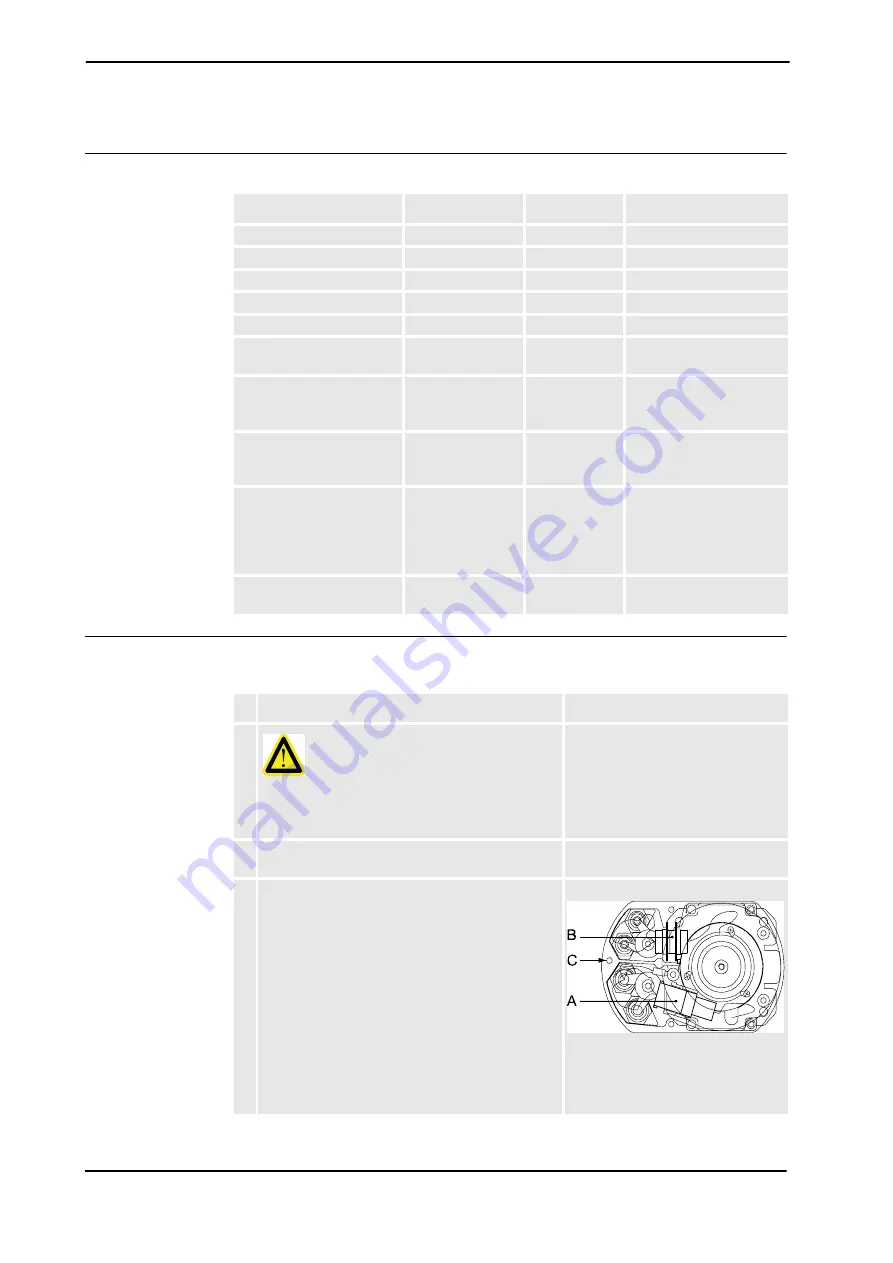
3. Disconnect the motor connectors R3.MP2 and
R3.FB2.
xx0200000401
•
A: R3.MP2
•
B: R3.FB2
•
C: Connection box
Continued
Continues on next page
Summary of Contents for IRB 2400/L
Page 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Page 191: ......
Page 192: ......
Page 193: ......
Page 194: ......
Page 195: ......
Page 198: ......
Page 199: ......
Page 202: ......
Page 203: ......
Page 205: ......
Page 226: ......







































































