


























2 Installation and commissioning
2.3.1. Lifting robot with lifting slings
3HAC022031-001 Revision: C
44
©
Co
py
rig
h
t 200
4-
200
8 ABB. All righ
ts reser
v
ed.
2.3 On-site installation
2.3.1. Lifting robot with lifting slings
General
This section details how to lift the robot using lifting slings.
Required equipment
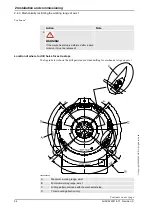
Illustration, attachment of lifting slings
The figure below shows how to attach the lifting slings to the robot.
xx0200000164
Lifting of robot
Equipment
Note
Sling line Type: KDBK 7-8.
Length: 2 m. Load at 90°: 380 kg.
Action
Note
1. Move the robot to the lifting position shown in
the figure above.
If necessary, release the brakes as
detailed in section
releasing the brakes on page 45
.
2. Attach the straps to the special eye bolts on the
gearboxes for axes 2 and 3.
3. Lift the robot carefully.
Summary of Contents for IRB 2400/L
Page 1: ...Product manual Articulated robot IRB 2400 L IRB 2400 10 IRB 2400 16 M2000 M2000A M2004 ...
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022031 001 Revision C Copyright 2004 2008 ABB All rights reserved ...
Page 191: ......
Page 192: ......
Page 193: ......
Page 194: ......
Page 195: ......
Page 198: ......
Page 199: ......
Page 202: ......
Page 203: ......
Page 205: ......
Page 226: ......


































































