


























Calibration method
Description
Type of calibration
Wrist Optimization
Optimization of TCP reorientation perform-
ance. The purpose is to improve reorientation
accuracy for continuous processes like weld-
ing and gluing.
Optimization
Wrist optimization will update standard calib-
ration data for axes 4, 5 and 6.
i
The robot is calibrated by either Calibration Pendulum or Axis Calibration at factory. Always use
the same calibration method as used at the factory.
Information about valid calibration method is found on the calibration label or in the calibration
menu on the FlexPendant.
If no data is found related to standard calibration, Calibration Pendulum is used as default.
Brief description of calibration methods
Calibration Pendulum method
Calibration Pendulum is a standard calibration method for calibration of all ABB
robots (except IRB 6400R, IRB 640, IRB 1400H, and IRB 4400S).
Two different routines are available for the Calibration Pendulum method:
•
Calibration Pendulum II
•
Reference calibration
The calibration equipment for Calibration Pendulum is delivered as a complete
toolkit, including the
Operating manual - Calibration Pendulum
, which describes
the method and the different routines further.
Axis Calibration method
Axis Calibration is a standard calibration method for calibration of IRB 2600 and
is the most accurate method for the standard calibration. It is the recommended
method in order to achieve proper performance.
The following routines are available for the Axis Calibration method:
•
Fine calibration
•
Update revolution counters
•
Reference calibration
The calibration equipment for Axis Calibration is delivered as a toolkit.
The actual instructions of how to perform the calibration procedure and what to
do at each step is given on the FlexPendant. You will be guided through the
calibration procedure, step by step.
Wrist Optimization method
Wrist Optimization is a method for improving reorientation accuracy for continuous
processes like welding and gluing and is a complement to the standard calibration
method.
The following routines are available for the Wrist Optimization method:
•
Wrist Optimization
The actual instructions of how to perform the calibration procedure and what to
do at each step is given on the FlexPendant. You will be guided through the
calibration procedure, step by step.
Continues on next page
Product specification - IRB 2600
31
3HAC035959-001 Revision: AA
© Copyright 2009-2021 ABB. All rights reserved.
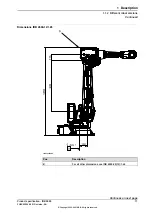
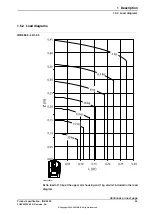
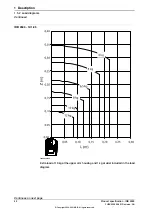
1 Description
1.4.1 Calibration methods
Continued
Summary of Contents for IRB 2600
Page 1: ...ROBOTICS Product specification IRB 2600 ...
Page 6: ...This page is intentionally left blank ...
Page 10: ...This page is intentionally left blank ...
Page 92: ...This page is intentionally left blank ...
Page 94: ...This page is intentionally left blank ...
Page 96: ......
Page 97: ......







































































