













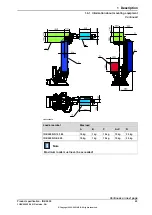
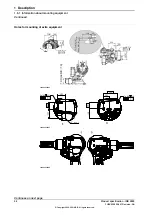
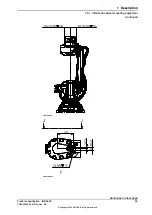
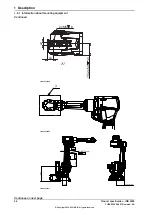





Limited axis 5, center line down
Maximum moment of interia
Robot Type
Axis
Ja5 = Load x ((Z + 0,085
2
+ L2) + max (J
0x
, J
0y
) ≤ 2.0 kgm
2
-20/1.65
-12/1.65
5
-12/1.85
Ja5 = Load x ((Z + 0,135)
2
+ L
2
) + max (J
0x
, J
0y
) ≤ 2.0 kgm
2
ID-15/1.85
Ja5 = Load x ((Z + 0,2)
2
+ L
2
) + max (J
0x
, J
0y
) ≤ 2.0 kgm
2
ID-8/2.00
Ja6 = Load x L
2
+ J
0Z
≤ 1.0 kgm
2
-20/1.65
-12/1.65
6
-12/1.85
ID-8/2.00
ID-15/1.85
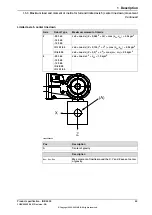
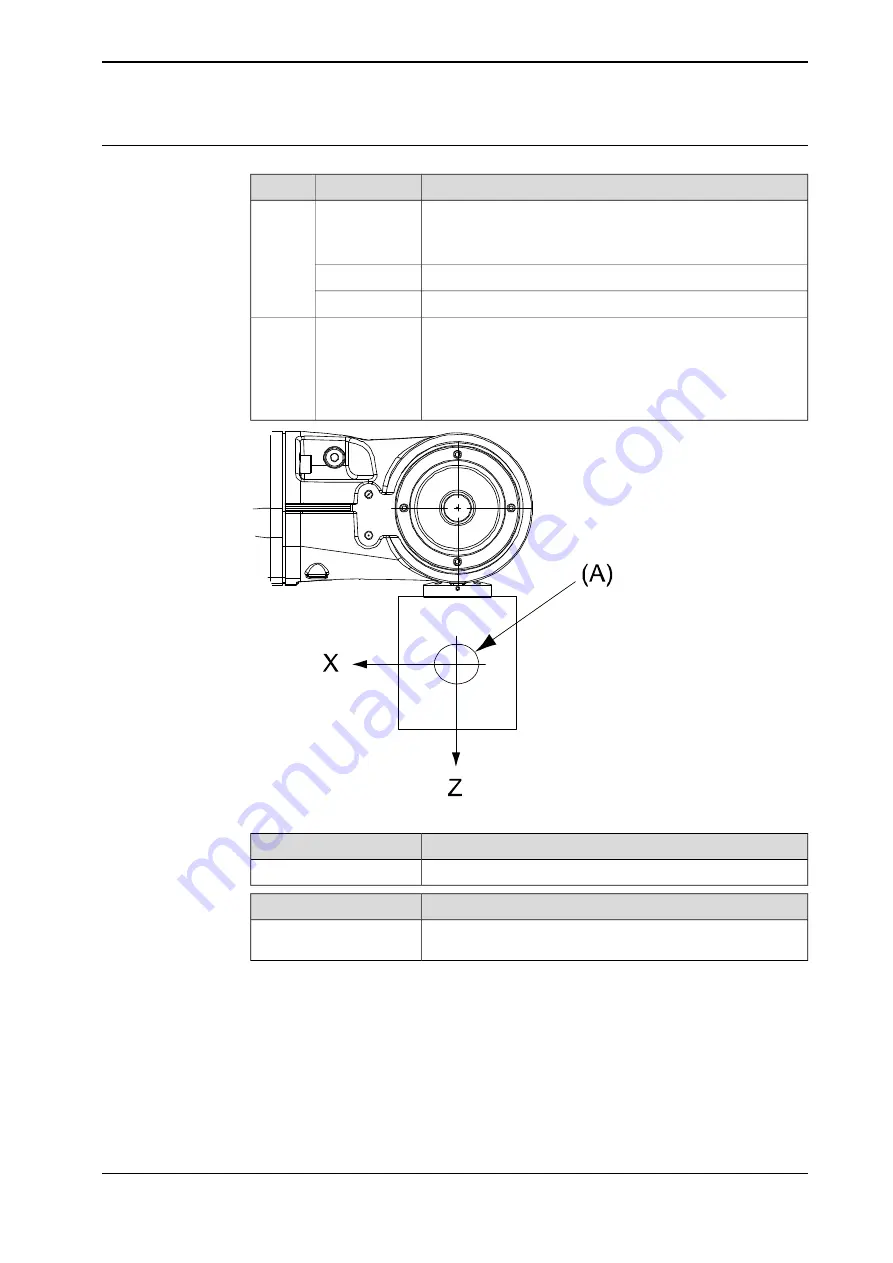
xx0800000459
Description
Pos
Center of gravity
A
Description
Max. moment of inertia around the X, Y and Z axes at center
of gravity.
J
ox
, J
oy
, J
oz
Product specification - IRB 2600
49
3HAC035959-001 Revision: AA
© Copyright 2009-2021 ABB. All rights reserved.
1 Description
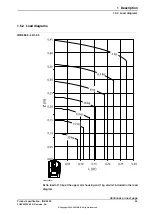
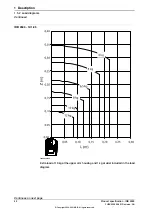
1.5.3 Maximum load and moment of inertia for full and limited axis 5 (center line down) movement
Continued
Summary of Contents for IRB 2600
Page 1: ...ROBOTICS Product specification IRB 2600 ...
Page 6: ...This page is intentionally left blank ...
Page 10: ...This page is intentionally left blank ...
Page 92: ...This page is intentionally left blank ...
Page 94: ...This page is intentionally left blank ...
Page 96: ......
Page 97: ......







































































