


















1.5.5 Maximum TCP acceleration
General
Higher values can be reached with lower loads than the nominal because of our
dynamical motion control QuickMove2. For specific values in the unique customer
cycle, or for robots not listed in the table below, we recommend then to use
RobotStudio.
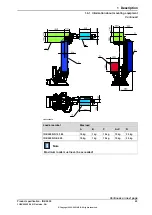
Maximum Cartesian design acceleration for nominal loads
Controlled Motion
Max acceleration at nominal load
COG [m/s
2
]
E-stop
Max acceleration at nominal load
COG [m/s
2
]
Robot type
51
94
IRB 2600-20/1.65
68
105
IRB 2600-12/1.85
59
104
IRB 2600ID-15/1.85
89
134
IRB 2600ID-8/2.0
Note
Acceleration levels for emergency stop and controlled motion includes
acceleration due to gravitational forces. Nominal load is defined with nominal
mass and cog with max offset in Z and L (see the load diagram).
Product specification - IRB 2600
51
3HAC035959-001 Revision: AA
© Copyright 2009-2021 ABB. All rights reserved.
1 Description
1.5.5 Maximum TCP acceleration
Summary of Contents for IRB 2600
Page 1: ...ROBOTICS Product specification IRB 2600 ...
Page 6: ...This page is intentionally left blank ...
Page 10: ...This page is intentionally left blank ...
Page 92: ...This page is intentionally left blank ...
Page 94: ...This page is intentionally left blank ...
Page 96: ......
Page 97: ......







































































