















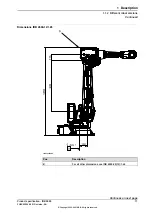












1.1.2 Different robot versions
General
The IRB 2600 is available in five variants and they can be wall mounted, inverted
or tilted (up to 45 degrees around the Y-axis or X-axis). See
load and load diagrams on page 37
for limitations.
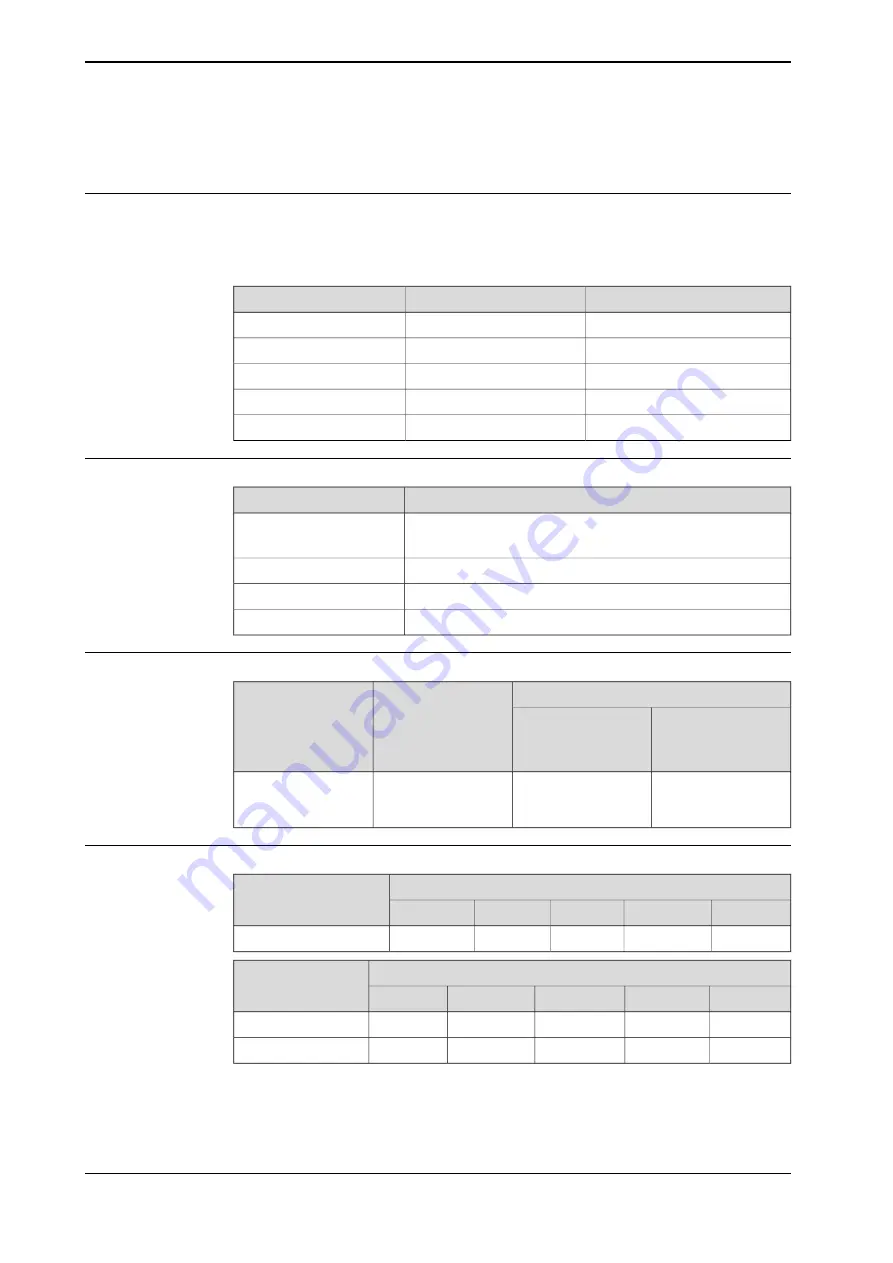
Reach (m)
Handling capacity (kg)
Robot type
1.65
20
IRB 2600
1.65
12
IRB 2600
1.85
12
IRB 2600
1.85
15
IRB 2600ID
2.00
8
IRB 2600ID
Manipulator weight
Weight
Robot type
272 kg
IRB 2600-20/1.65
IRB 2600-12/1.65
284 kg
IRB 2600-12/1.85
273 kg
IRB 2600ID-15/1.85
276 kg
IRB 2600ID-8/2.00
Other technical data
Note
Description
Data
IRB2600-20/1.65
IRB2600-12/1.65
IRB2600-12/1.85
IRB2600ID-15/1.85
IRB2600ID-8/20
< 72 dB (A) Leq (acc.
to Machinery directive
2006/42/EG)
< 69 dB (A) Leq (acc.
to Machinery directive
2006/42/EG)
The sound pressure
level outside the
working space
Airborn noise level
Power consumption at max load
IRB 2600
Type of Movement
ID-8/2.00
ID-15/1.85
-12/1.85
-12/1.65
-20/1.65
0.86 kW
0.86 kW
0.92 kW
0.953 kW
0.941 kW
ISO Cube Max. velocity
IRB 2600
Robot in calibration
position
ID-8/2.00
ID-15/1.85
-12/1.85
-12/1.65
-20/1.65
0.207 kW
0.206 kW
0.232 kW
0.146 kW
0.145 kW
Brakes engaged
0. 39 kW
0.40 kW
0.43 kW
0.366 kW
0.429 kW
Brakes disengaged
Continues on next page
14
Product specification - IRB 2600
3HAC035959-001 Revision: AA
© Copyright 2009-2021 ABB. All rights reserved.
1 Description
1.1.2 Different robot versions
Summary of Contents for IRB 2600
Page 1: ...ROBOTICS Product specification IRB 2600 ...
Page 6: ...This page is intentionally left blank ...
Page 10: ...This page is intentionally left blank ...
Page 92: ...This page is intentionally left blank ...
Page 94: ...This page is intentionally left blank ...
Page 96: ......
Page 97: ......







































































