















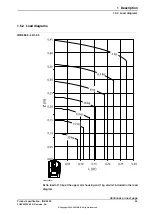


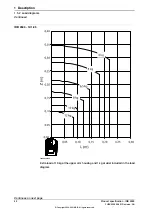








1.5 Robot load and load diagrams
1.5.1 Introduction to Robot load and load diagrams
Information
WARNING
It is very important to always define correct actual load data and correct payload
of the robot. Incorrect definitions of load data can result in overloading of the
robot.
If incorrect load data is used, and/or if loads outside the load diagram are used,
the following parts can be damaged due to overload:
•
motors
•
gearboxes
•
mechanical structure
WARNING
In RobotWare, the service routine LoadIdentify can be used to determine correct
load parameters. The routine automatically defines the tool and the load. See
Operating manual - IRC5 with FlexPendant
, for detailed information.
WARNING
Robots running with incorrect load data and/or with loads outside the load
diagram, will not be covered by robot warranty.
General
The load diagrams include a nominal payload inertia, J
0
of 0.2 kgm
2
for all variants,
also extra load at the upper arm housing and wrist are included according to table
below. At different moment of inertia the load diagram will be changed. For robots
that are allowed tilted, wall or inverted mounted, the load diagrams as given are
valid and thus it is also possible to use RobotLoad within those tilt and axis limits.
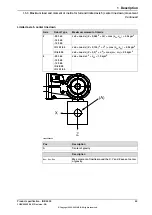
Load at wrist
Extra arm load
Robot
1 kg
10 kg
IRB 2600-20/1.65
IRB 2600-12/1.85
IRB 2600ID-15/1.85
1 kg
15 kg
IRB 2600-12/1.65
IRB 2600ID-8/2.00
Continues on next page
Product specification - IRB 2600
37
3HAC035959-001 Revision: AA
© Copyright 2009-2021 ABB. All rights reserved.
1 Description
1.5.1 Introduction to Robot load and load diagrams
Summary of Contents for IRB 2600
Page 1: ...ROBOTICS Product specification IRB 2600 ...
Page 6: ...This page is intentionally left blank ...
Page 10: ...This page is intentionally left blank ...
Page 92: ...This page is intentionally left blank ...
Page 94: ...This page is intentionally left blank ...
Page 96: ......
Page 97: ......






































































