




















1.10 Customer connections
1.10.1 Customer connection on robot
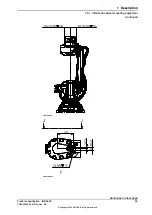
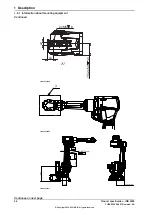
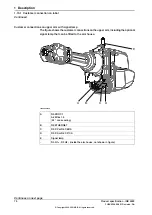
Location of customer connection
For the connection of extra equipment to the robot, cables and air hose are
integrated into the robot´s cabling, and there can be two UTOW71210SH06 and
one UTOW71626SH06 connector on the front part of the upper arm.
Note
The maximum leakage current for attached equipment must not exceed 10mA.
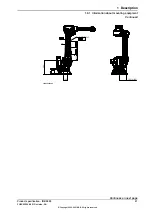
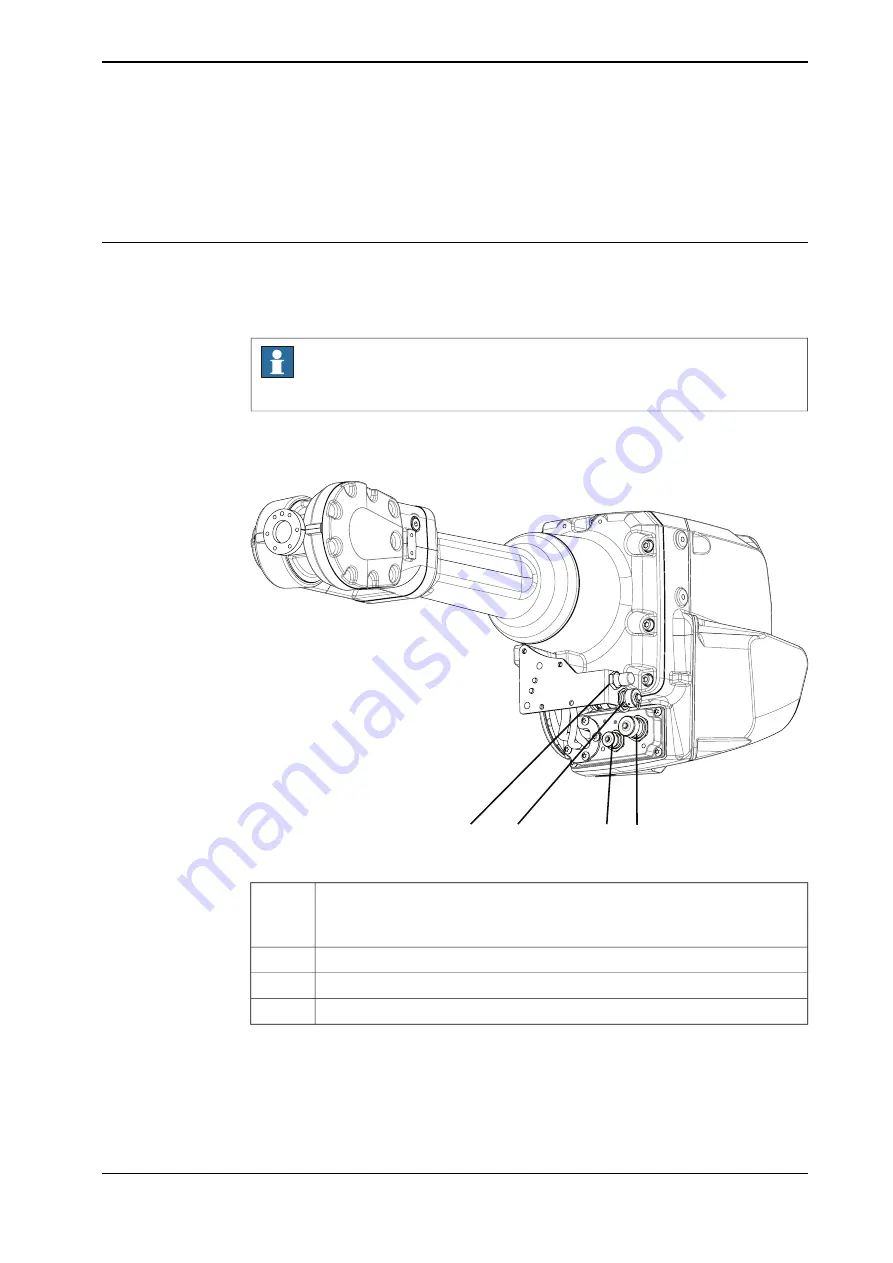
The customer connections are located on the robot as shown in the figure.
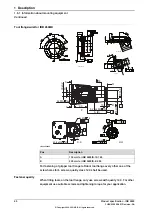
Customer connections on upper arm
A
B
C
D
xx2000001657
R2.PROC1
A
Air M16x1.5
(24° cone sealing)
R2.ETHERNET
B
R2.CP or R2.CBUS
C
R2.CS or R2.CP/CS
D
Continues on next page
Product specification - IRB 2600
69
3HAC035959-001 Revision: AA
© Copyright 2009-2021 ABB. All rights reserved.
1 Description
1.10.1 Customer connection on robot
Summary of Contents for IRB 2600
Page 1: ...ROBOTICS Product specification IRB 2600 ...
Page 6: ...This page is intentionally left blank ...
Page 10: ...This page is intentionally left blank ...
Page 92: ...This page is intentionally left blank ...
Page 94: ...This page is intentionally left blank ...
Page 96: ......
Page 97: ......







































































