















Prepared by, date:
We reserve all rights in this document and in the information contained therein.Reproduction, use or
disclosure to third parties without express authority is strictly forbidden. © Copyright 2003 ABB
Page 109
13
Total
3HAC028647-009
Latest revision:
Approved by, date:
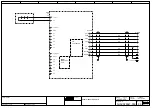
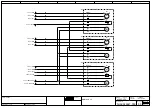
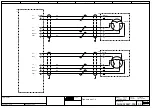
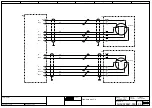
OPTION: External connections
Location:
Plant:
=
+
+
Sublocation:
IRB360
Manipulator
Document no.
Next
Rev. Ind
00
Lab/Office:
Status:
APPROVED
2008-04-04
1
2
3
4
5
6
7
8
-R1.MP
A3
A3
A4
A4
D1
D1
D2
D2
D3
D3
D4
D4
B1
B1
B4
B4
B3
B3
C2
C2
B2
B2
C1
C1
A10
A10
D9
D9
D8
D8
B10
B10
C9
C9
C8
C8
C10
C10
B9
B9
B7
B7
B8
B8
C7
C7
-R1.MP 1-3
2
2
3
3
18
18
16
16
7
7
15
15
9
9
10
10
11
11
12
12
13
13
17
17
-R1.MP 4-6
1
1
5
5
6
6
8
8
10
10
11
11
12
12
13
13
14
14
15
15
-R1.H1
1
1
LIM 1A
LIM 2A
LIM 2B
LIM 1B
PE
GNYE
BK
BK
BK
BK
BK
BK
BK
BK
BK
BK
BK
BK
BK
BK
BK
BK
BK
BK
BU
BU
BU
BU
BU
BU
BU
BU
BU
BU
BU
BU
Summary of Contents for IRB 360/3
Page 1: ...Product manual Parallel robot IRB 360 IRB 360 3 IRB 360 1 800 M2004 ...
Page 2: ......
Page 8: ...Table of Contents 6 3HAC030005 001 Revision Copyright 2008 ABB All rights reserved ...
Page 246: ...Index 232 3HAC030005 001 Revision Copyright 2008 ABB All rights reserved ...
Page 247: ......





































































