





























2 Installation and Commissioning
2.3.4. Assemble the robot IRB360
3HAC030005-001 Revision: -
36
©
Copyri
ght 200
6 ABB
.
All ri
ghts res
erved.
2.3.4. Assemble the robot IRB360
Overview
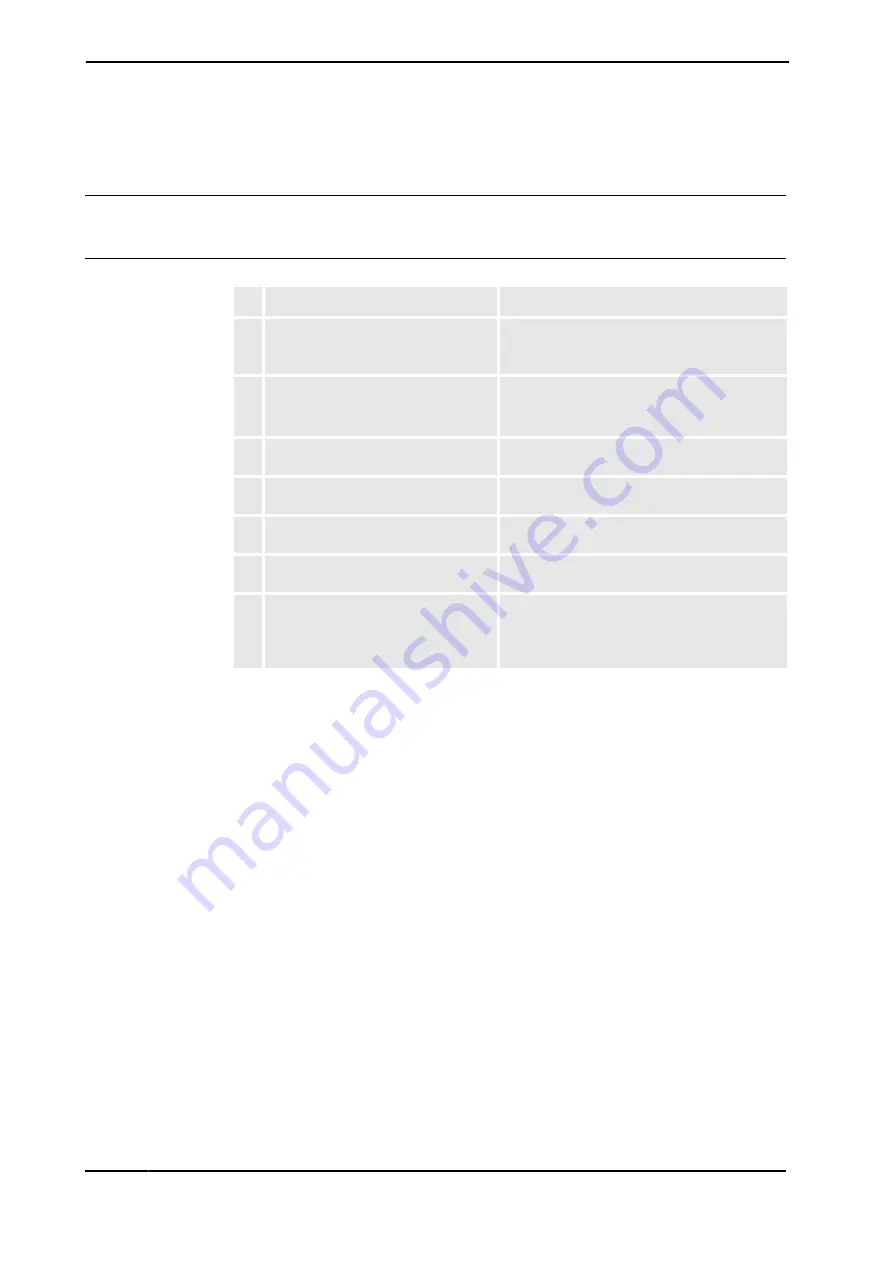
Follow these steps to assemble the robot after unpacking.
Assemble
Action
Note
1. Prepare the working site according to
sections:
Amount of required space on page 43
Orienting and securing the robot cage on page
44
2. Lift the robot according to instructions
in sections:
Lifting robot with fork lift on page 40
Lifting robot with roundslings on page 41
.
Pre-installation procedure on page 33
3. Securing the robot according to
section:
Orienting and securing the robot on page 46
.
4. Assemble the parallel arms according
to section:
Replacement of Parallel Arms on page 120
.
5. Assemble the Movable Plate
according to section:
Replacement of Movable Plate on page 130
6. Connecting the controller to the
manipulator
Connecting the controller to the manipulator on
page 68
7. Connecting power supply to the Dual
Cabinet Controller:
Connecting power supply to the Dual Cabinet
Controller
.
Connecting power supply to the IRC5 Panel
Mounted Controller
Continues on next page
Summary of Contents for IRB 360/3
Page 1: ...Product manual Parallel robot IRB 360 IRB 360 3 IRB 360 1 800 M2004 ...
Page 2: ......
Page 8: ...Table of Contents 6 3HAC030005 001 Revision Copyright 2008 ABB All rights reserved ...
Page 246: ...Index 232 3HAC030005 001 Revision Copyright 2008 ABB All rights reserved ...
Page 247: ......







































































