





























2 Installation and Commissioning
2.4.5. Orienting and securing the robot
49
3HAC030005-001 Revision: -
©
Copyri
ght 200
6 ABB
.
All ri
ghts res
erved.
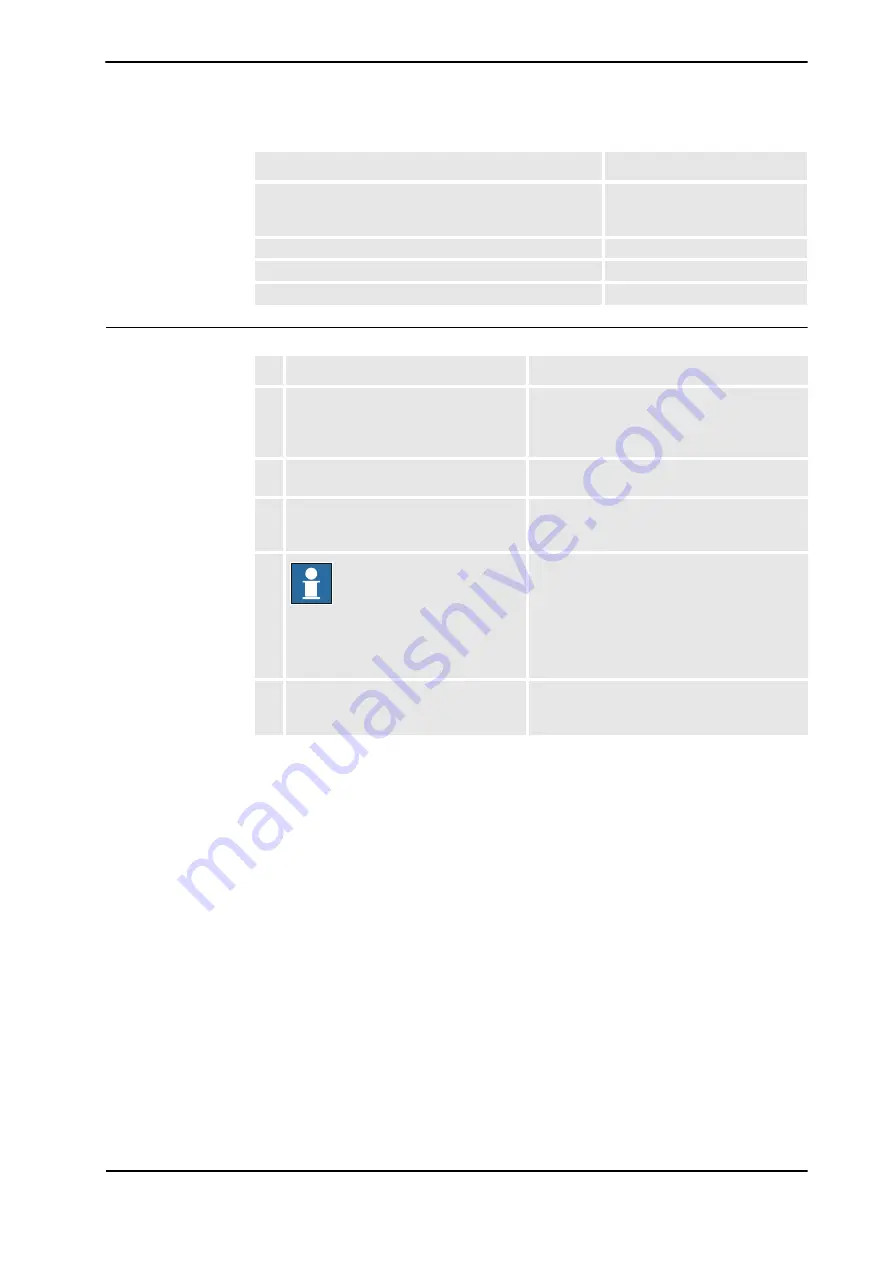
Orienting and securing
Attachments
Dimensions
Attachment bolts, 3 pcs.
M12x (50) (The length of the
screws depends on the design of
the frame).
Bonded seal washer, rubber/metal, 3 pcs.
Washer, EPDM-rubber compressed 50%, 3 pcs.
Spacer, metal, 3 pcs.
Action
Note
1. Make sure the installation site for the
robot conforms to the specifications in
section
2. Prepare the installation site.
Detailed in section
3. Lift the robot to the installation site.
Detailed in section
Lifting robot with fork lift on
and in section
4.
NOTE!
If use of ABB’s vacuum system is
intended, make sure there is a space
left for the bracket (F).
5. Fit and tighten the bolts and washers in
the base attachment holes.
The screw joint must be able to withstand the
stress loads defined in section
Continued
Summary of Contents for IRB 360/3
Page 1: ...Product manual Parallel robot IRB 360 IRB 360 3 IRB 360 1 800 M2004 ...
Page 2: ......
Page 8: ...Table of Contents 6 3HAC030005 001 Revision Copyright 2008 ABB All rights reserved ...
Page 246: ...Index 232 3HAC030005 001 Revision Copyright 2008 ABB All rights reserved ...
Page 247: ......































































