





























4.3.9 Replacement of joint balls
General
This section describes how to change the joint balls.
DANGER
Turn off all electrical power, hydraulic and pneumatic pressure supplies before
entering the workspace of the manipulator.
Also read the safety sections:
•
Safety risks related to pneumatic/hydraulic systems on page 33
•
Risks associated with live electric parts on page 29
•
Safety risks during installation and service work on robots on page 23
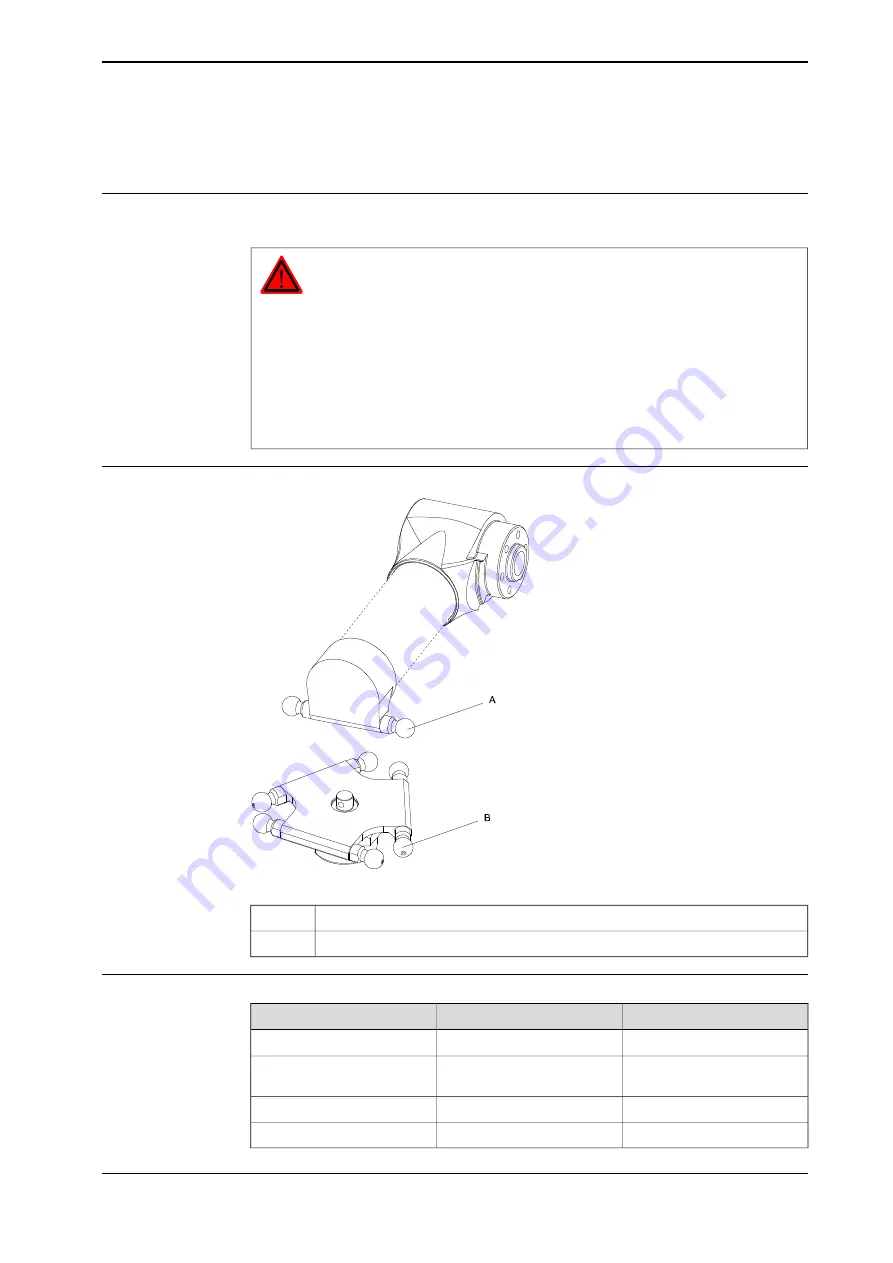
Location
xx0700000534
Joint ball
A
Joint ball
B
Required equipment and references
Note
Spare part no.
Equipment
Standard tools
See
Product manual, spare
parts - IRB 360
.
Joint ball
3HAC6194-1
Pliers for parallel arms
Loctite 243
Locking liquid
Continues on next page
Product manual - IRB 360
195
3HAC030005-001 Revision: U
© Copyright 2008-2018 ABB. All rights reserved.
4 Repair
4.3.9 Replacement of joint balls
Summary of Contents for IRB 360 Series
Page 1: ...ROBOTICS Product manual IRB 360 ...
Page 8: ...This page is intentionally left blank ...
Page 46: ...This page is intentionally left blank ...
Page 156: ...This page is intentionally left blank ...
Page 236: ...This page is intentionally left blank ...
Page 258: ...This page is intentionally left blank ...
Page 276: ...This page is intentionally left blank ...
Page 278: ...This page is intentionally left blank ...
Page 283: ......







































































