





























Delete SMB data
This section describes how to delete the data stored on the robot SMB memory or
the controller memory when creating spare parts.
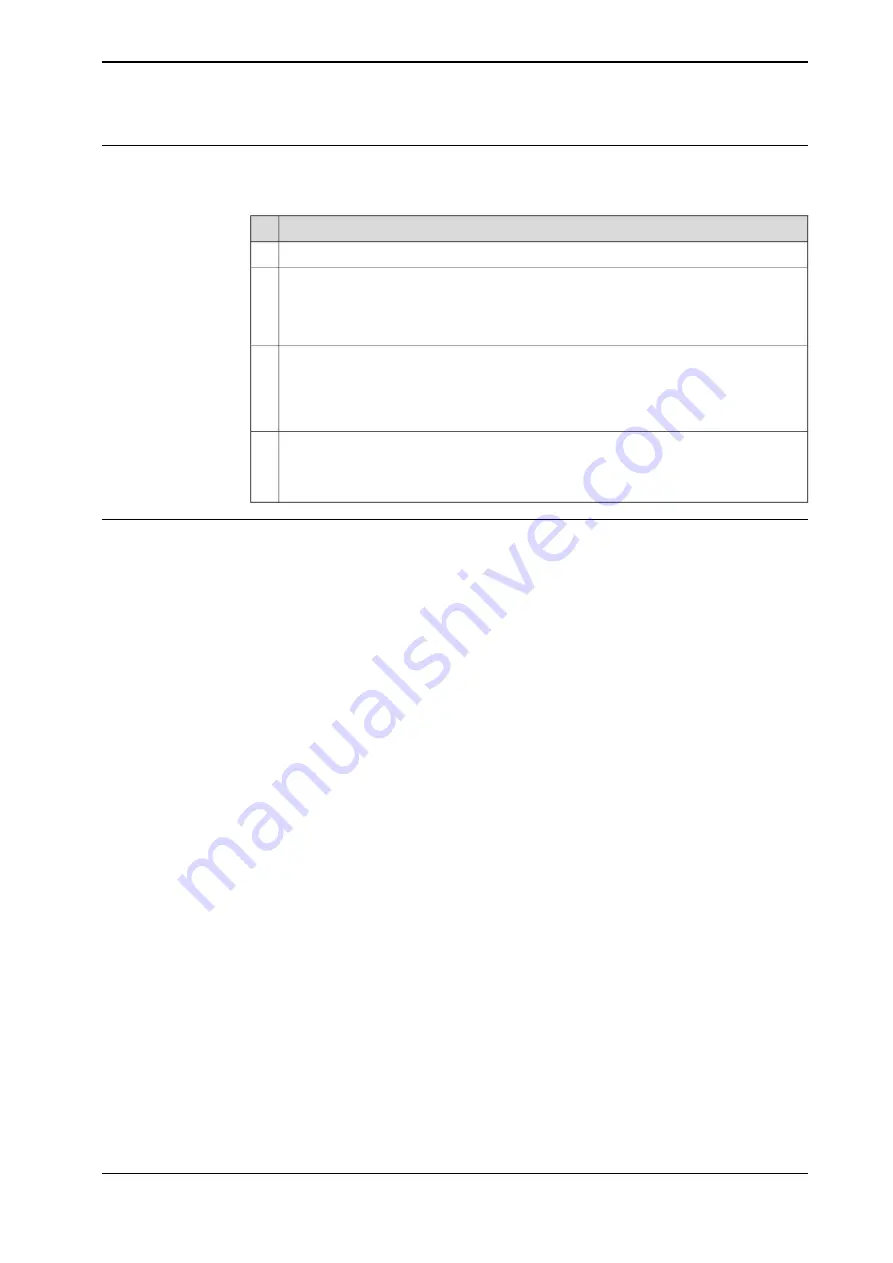
Action
On the
ABB
menu, tap
Calibration
and tap to select a mechanical unit.
1
Tap
Robot Memory
and then tap
Advanced
.
The following functions are available:
•
Clear controller memory
•
Clear robot memory
2
Tap
Clear Controller Memory
if the controller should be replaced and used as a spare
part.
A list of the SMB data stored in the controller is displayed. Tap
Clear
to delete the
controller memory for the selected robot. Repeat the procedure for all robots in the
controller memory.
3
Tap
Clear Robot Memory
if the SMB should be replaced and used as a spare part.
A list of the SMB data stored in the robot SMB memory is displayed. Tap
Clear
to delete
the memory for the selected robot. Repeat the procedure for all robots using this SMB
board.
4
Related information
Operating manual - RobotStudio
.
Operating manual - Service Information System
.
Application manual - Controller software IRC5
Product manual - IRB 360
253
3HAC030005-001 Revision: U
© Copyright 2008-2018 ABB. All rights reserved.
5 Calibration information
5.9 Serial measurement board memory
Continued
Summary of Contents for IRB 360 Series
Page 1: ...ROBOTICS Product manual IRB 360 ...
Page 8: ...This page is intentionally left blank ...
Page 46: ...This page is intentionally left blank ...
Page 156: ...This page is intentionally left blank ...
Page 236: ...This page is intentionally left blank ...
Page 258: ...This page is intentionally left blank ...
Page 276: ...This page is intentionally left blank ...
Page 278: ...This page is intentionally left blank ...
Page 283: ......







































































