





























5.3 Calibration movement directions for all axes
Overview
When calibrating, the axis must consistently be run towards the calibration position
in the same direction in order to avoid position errors caused by backlash in gears
and so on. Positive directions are shown in the graphic below.
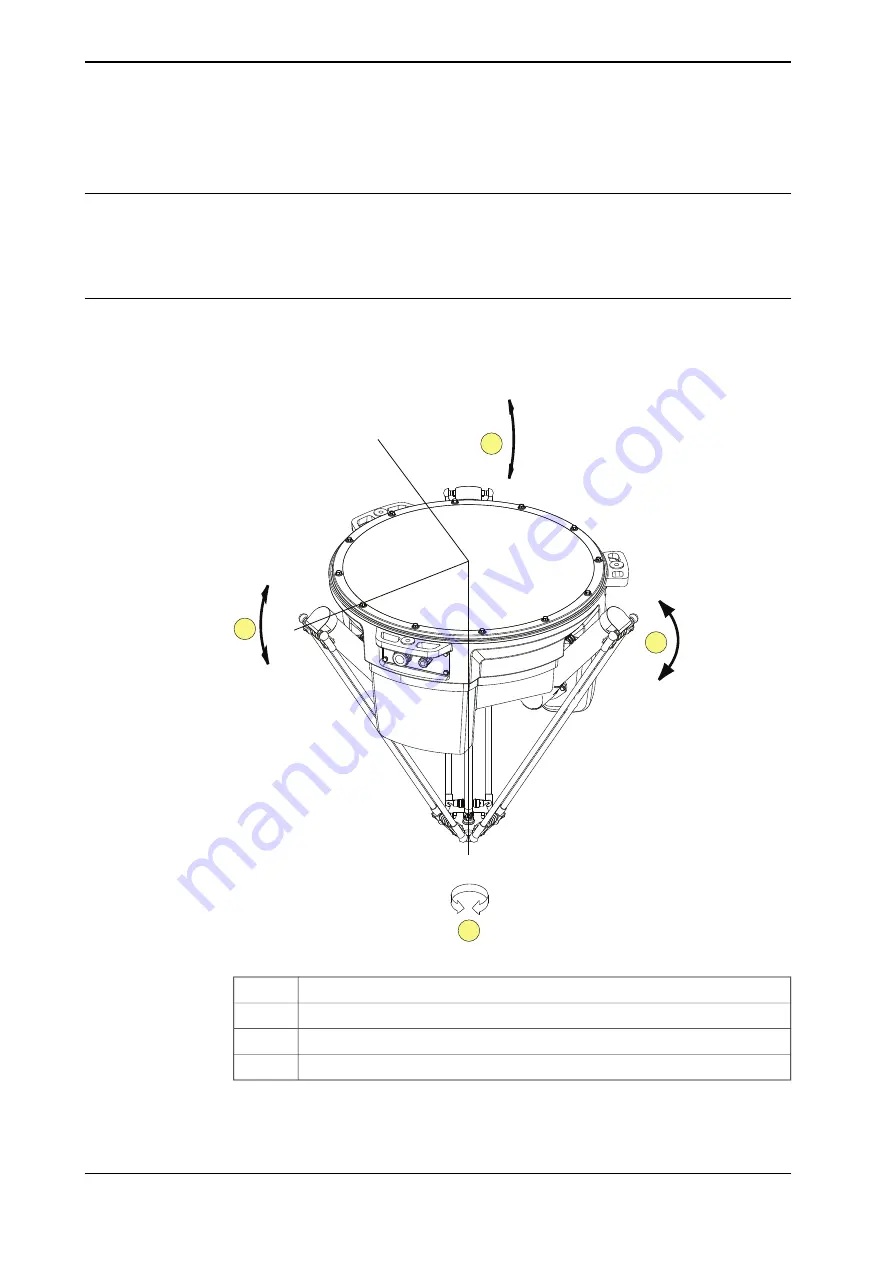
Calibration movement and jogging directions
The following graphic shows the positive and negative directions for each axis and
the linear directions when jogging the robot in the base coordinate system.
+X
+Y
+Z
C
A
B
D
-
-
-
-
+
+
+
+
xx0700000448
Axis 1
A
Axis 2
B
Axis 3
C
Axis 4
D
230
Product manual - IRB 360
3HAC030005-001 Revision: Z
© Copyright 2008-2021 ABB. All rights reserved.
5 Calibration information
5.3 Calibration movement directions for all axes
Summary of Contents for IRB 360
Page 1: ...ROBOTICS Product manual IRB 360 ...
Page 8: ...This page is intentionally left blank ...
Page 266: ...This page is intentionally left blank ...
Page 268: ...This page is intentionally left blank ...
Page 271: ......



























































