





























5.7 Fine calibration procedure on FlexPendant
Overview
This section describes how to use the FlexPendant when performing a fine
calibration of the robot.
Fine calibration procedure when connecting to IRC5 controller
Use this procedure to fine calibrate using the FlexPendant.
Action
On the
ABB
menu, tap
Calibration
.
1
All mechanical units connected to the system are shown along with their calibration
status.
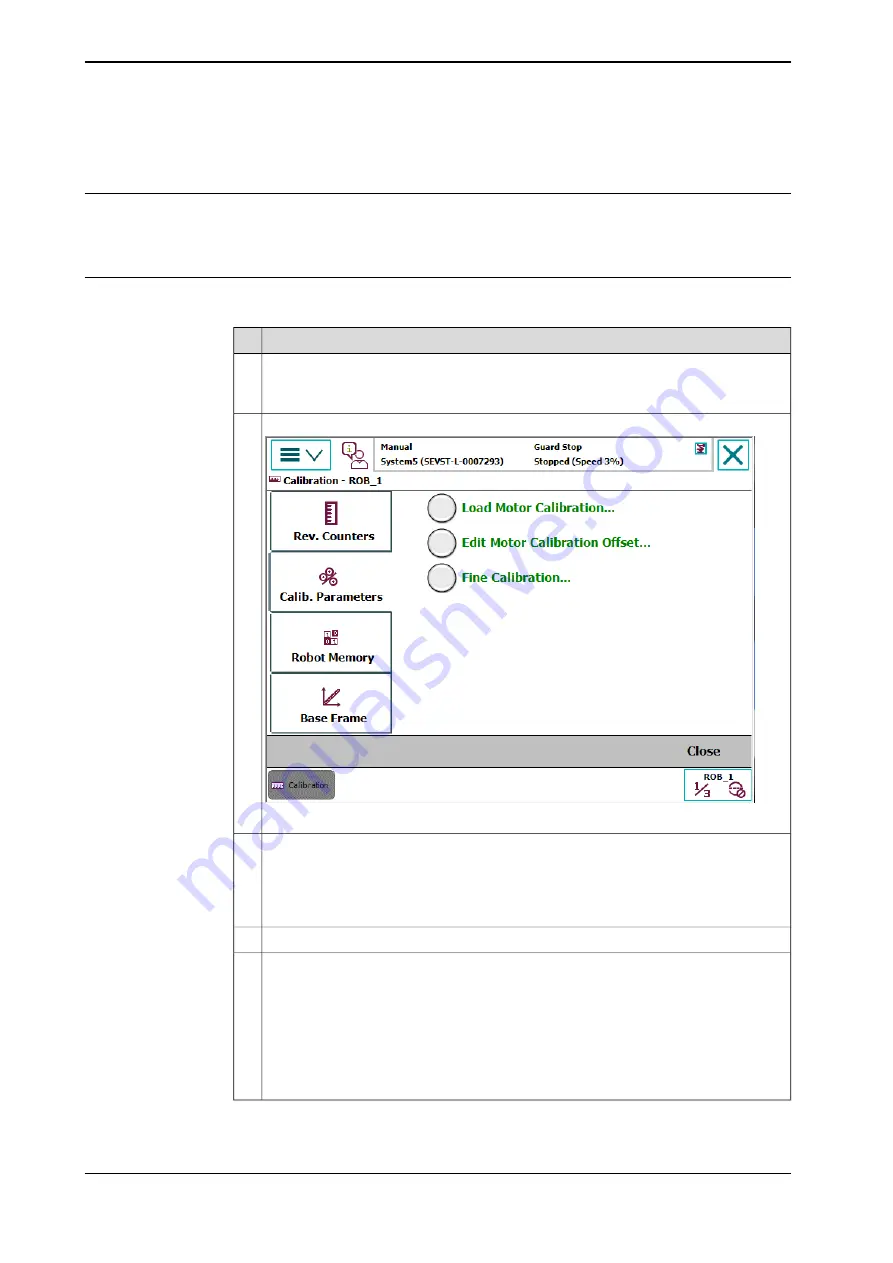
Tap to select the mechanical unit and then tap
Calib. Parameters
.
xx1500001762
2
Tap
Fine Calibration...
.
3
A dialog box is displayed, warning that updating the revolution counters may change
programmed robot positions:
•
Tap
Yes
to proceed.
•
Tap
No
to cancel.
Select the check-box for the axis to calibrate.
4
Tap
Calibrate
.
5
A dialog box is displayed, warning that calibration of the selected axes will be changed,
which cannot be undone:
•
Tap
Calibrate
to proceed.
•
Tap
Cancel
to cancel.
Tapping
Calibrate
results in briefly displaying a dialog box, announcing that the calib-
ration process has started.
The axis is calibrated and the system returns to the list of available mechanical units.
Continues on next page
238
Product manual - IRB 360
3HAC030005-001 Revision: Z
© Copyright 2008-2021 ABB. All rights reserved.
5 Calibration information
5.7 Fine calibration procedure on FlexPendant
Summary of Contents for IRB 360
Page 1: ...ROBOTICS Product manual IRB 360 ...
Page 8: ...This page is intentionally left blank ...
Page 266: ...This page is intentionally left blank ...
Page 268: ...This page is intentionally left blank ...
Page 271: ......







































































