
























2.4.8 Loads
General
This section describes loads from external equipment. For information about
general loads and diagrams see
Product specification - IRB 360
.
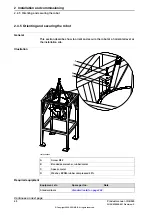
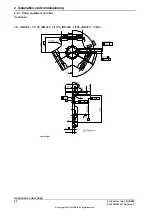
Extra equipment attached to the manipulator arms
xx0700000716
Limitation lines for center of gravity for M1
M1
Limitation lines for center of gravity for M2
M2
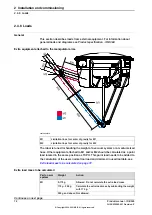
The robot is tuned for handling the weight of a vacuum system or a medium sized
hose. Other equipment attached to M1 and/or M2 should be calculated as a point
load located in the same position as TCPO. This point load needs to be added to
the calculation of the users normal tool load and declared in used tooldata, see
Extra load mass to be calculated on page 72
.
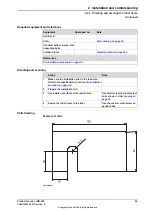
Extra load mass to be calculated
Action
Weight
Part on arm
system
Allowed. Do not calculate the extra load mass.
0-175 g
M1
Calculate the extra load mass by subtracting the weight
with 175 g.
i
175 g - 350 g
Not allowed.
350 g and above
Continues on next page
72
Product manual - IRB 360
3HAC030005-001 Revision: Z
© Copyright 2008-2021 ABB. All rights reserved.
2 Installation and commissioning
2.4.8 Loads
Summary of Contents for IRB 360
Page 1: ...ROBOTICS Product manual IRB 360 ...
Page 8: ...This page is intentionally left blank ...
Page 266: ...This page is intentionally left blank ...
Page 268: ...This page is intentionally left blank ...
Page 271: ......







































































