











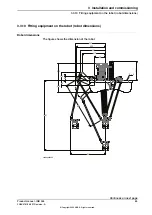















Extra equipment attached to the manipulator arms
Extra loads can be mounted on the manipulator. Definitions of dimensions and
masses are shown in the following figures. Maximum allowed arm load depends
on center of gravity of arm load and robot payload.
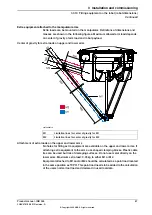
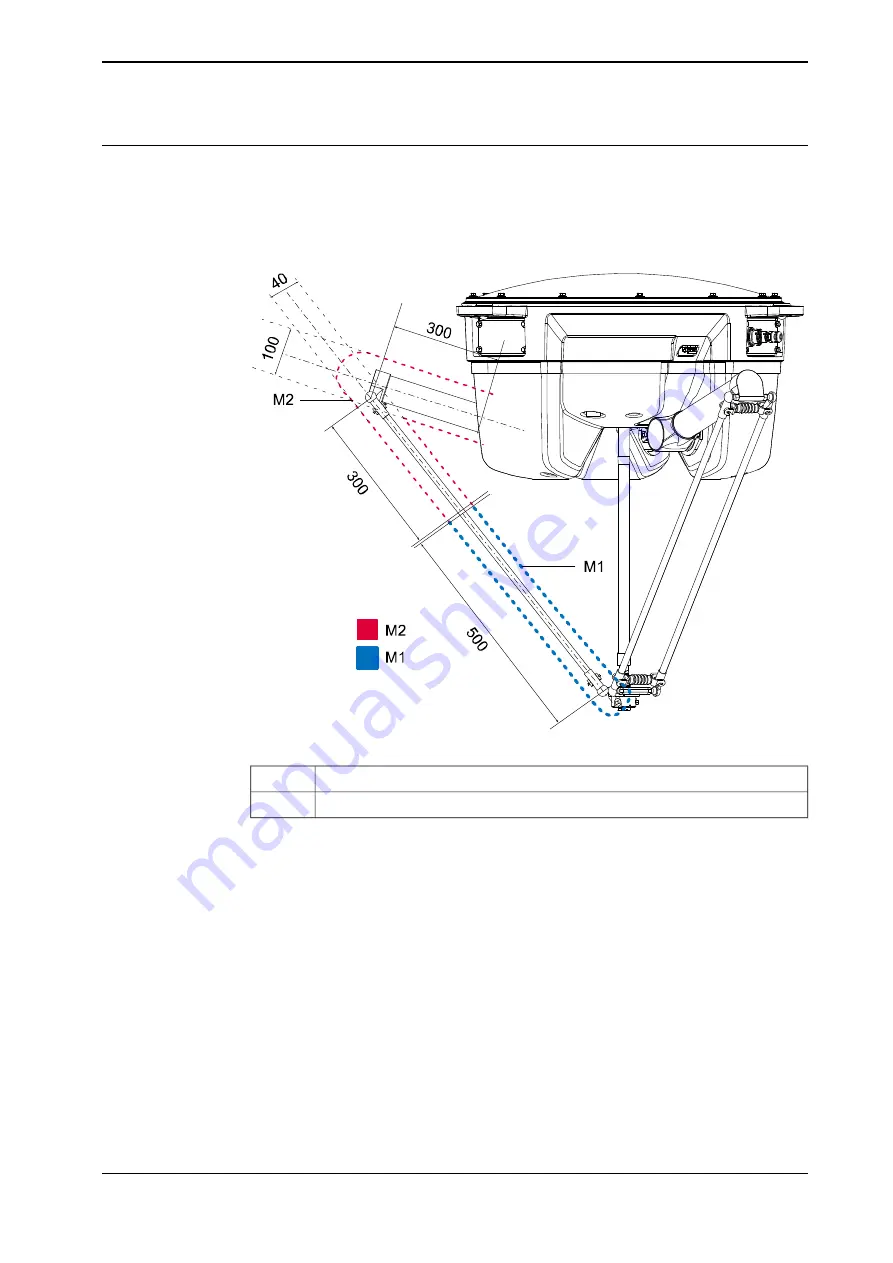
Center of gravity for extra loads on upper and lower arms
xx0700000716
Limitation lines for center of gravity for M1
M1
Limitation lines for center of gravity for M2
M2
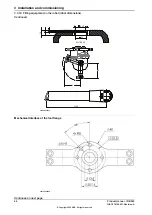
Attachment of extra loads on the upper and lower arms
No holes for fitting extra equipment are available on the upper and lower arms. If
attaching extra equipment to the arms, use shaped clamping blocks. Plastic cable
ties can be used but risk of damaging surfaces. Do not use metal directly on the
lower arms. Maximum extra load: 0.35 kg to either M1 or M2.
Equipment attached to M1 and/or M2 should be calculated as a point load located
in the same position as TCPO. This point load needs to be added to the calculation
of the users normal tool load and declared in used tool data.
Product manual - IRB 365
67
3HAC079185-001 Revision: A
© Copyright 2022 ABB. All rights reserved.
3 Installation and commissioning
3.3.10 Fitting equipment on the robot (robot dimensions)
Continued
Summary of Contents for IRB 365
Page 1: ...ROBOTICS Product manual IRB 365 ...
Page 8: ...This page is intentionally left blank ...
Page 14: ...This page is intentionally left blank ...
Page 198: ...This page is intentionally left blank ...
Page 216: ...This page is intentionally left blank ...
Page 232: ...This page is intentionally left blank ...
Page 234: ...This page is intentionally left blank ...
Page 238: ......
Page 239: ......





































































