





























1 Description
1.8.1 Introduction
3HAC9117-1
Rev.N
43
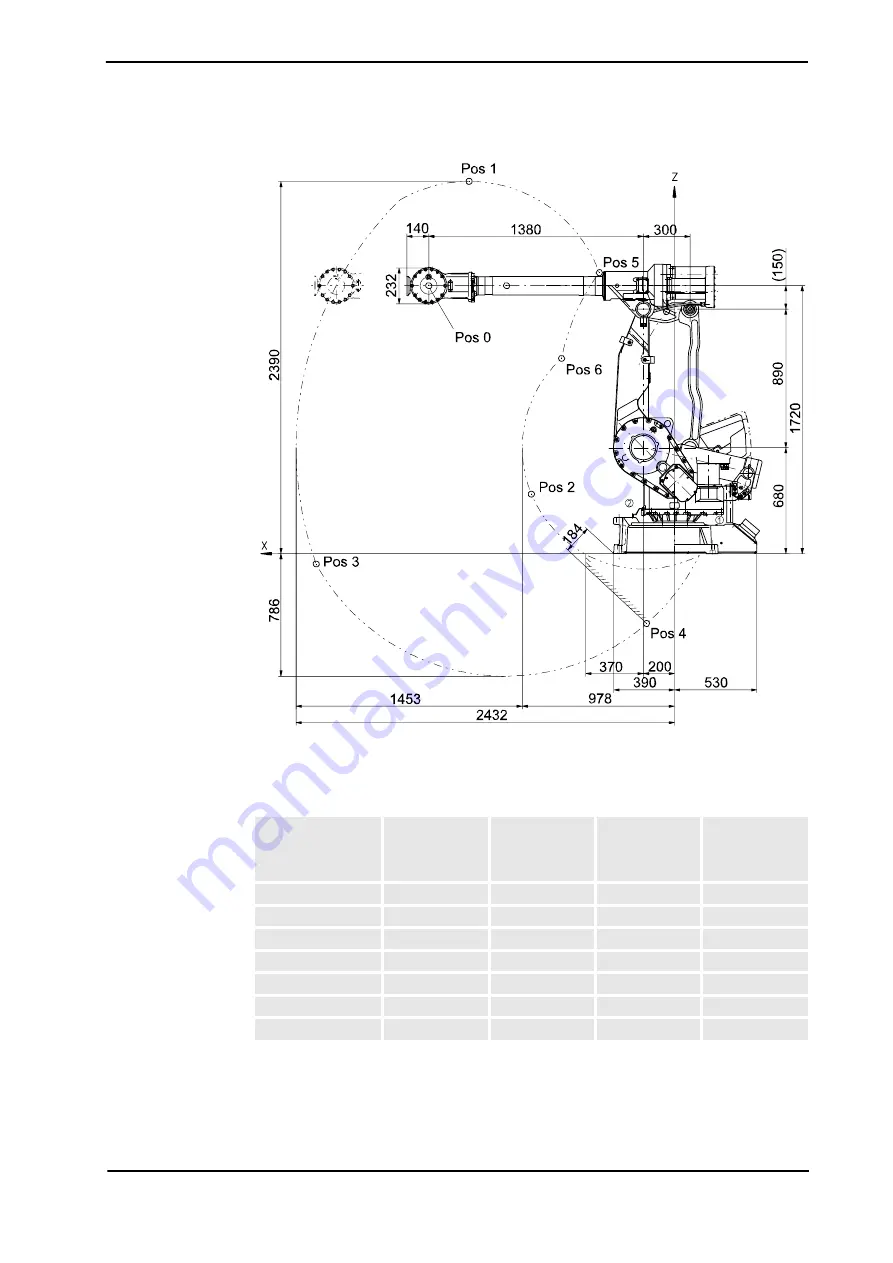
Figure 24 The extreme positions of the robot arm IRB 4400/L30 (dimensions in mm).
Positions (mm) and Angles (degrees) for IRB 4400/L30:
Position No.
(see Figure 24)
Position
(mm) X
Position
(mm) Z
Angle
(degrees)
Axis 2
Angle
(degrees)
Axis 3
0
1580
1720
0
0
1
1320
2390
0
-30
2
919
383
0
65
3
2303
-66
95
-60
4
180
-448
95
42
5
484
1804
-70
40
6
725
1254
-70
65
Summary of Contents for IRB 4400/45
Page 2: ......
Page 6: ...Table of Contents 4 Rev N 3HAC9117 1 ...
Page 54: ...1 Description 1 8 5 Signals 52 Rev N 3HAC9117 1 ...
Page 64: ...3 Accessories 62 Rev N 3HAC9117 1 ...
Page 66: ...Index 64 Rev N 3HAC9117 1 ...
Page 67: ......
































































