





























4 Repair
4.5.3. Replacement of parallel arm / Replacement of bearing
169
3HAC022032-001 Revision: E
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
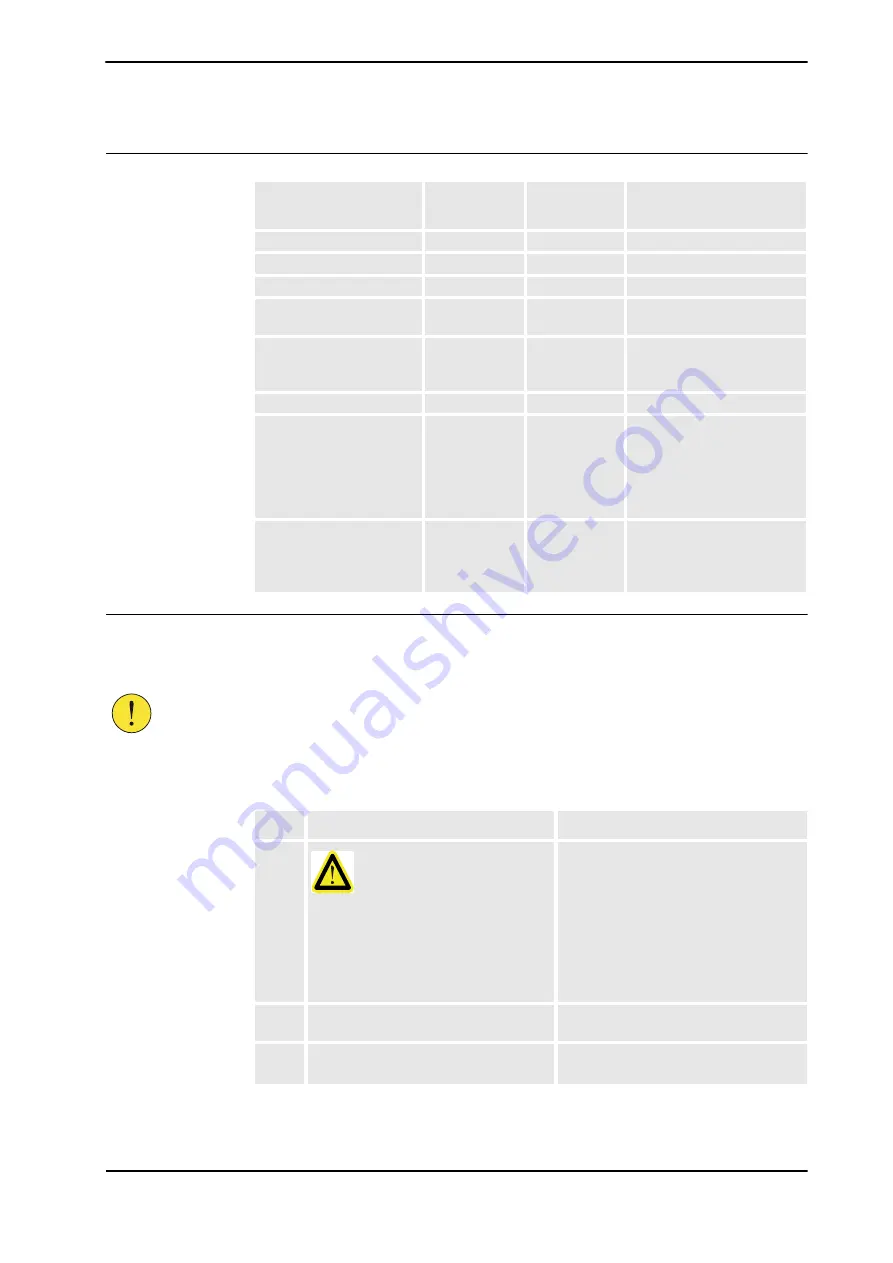
Required equipment
Removal, parallel arm/bearing
The procedure below details how to remove the parallel arm from the robot during repair
work. It also details how to remove the bearing from the parallel arm in order to replace it.
Caution!
The parallel arm weighs 70 kg (robot version IRB 4400/45 and IRB 4450S) or 115 kg (robot
version IRB 4400/60, IRB 4400/L30, IRB 4400/L10, IRB 4400/S)! All lifting equipment
used must be dimensioned accordingly!
Equipment, etc.
Spare part
no.
Art. no.
Note
V-ring sealing
3HAB 3732-11
Groove ball bearing
3HAC 10905-1
Sealing ring
3HAB 3749-1
Grease
3HAB 3537-1
Used to lubricate the
bearings and sealings.
Standard toolkit
3HAC 17594-1 The contents are defined in
section Standard toolkit on
page 264.
Lifting tool
3HAB 1412-1
Used to lift the parallel arm.
Other tools and
procedures may be
required. See references
to these procedures in the
step-by-step instructions
below.
These procedures include
references to the tools
required.
Calibration Pendulum
Instruction
General calibration
information is included in
section
.
Action
Info/Illustration
1.
Turn off all electric power, hydraulic and
pneumatic pressure supplies to the
robot!
For Foundry Prime robots: Do not turn off
the air pressure to motors and SMB.
2. Remove the tie rod.
Detailed in
.
3. Fit the lifting tool to the parallel arm.
Unload the arm with a crane.
Continued
Continues on next page
Summary of Contents for IRB 4400 - 45
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 296: ......
Page 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Page 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Page 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Page 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Page 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Page 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Page 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Page 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Page 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Page 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Page 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Page 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Page 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Page 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Page 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Page 321: ......







































































