





























4 Repair
4.5.3. Replacement of parallel arm / Replacement of bearing
3HAC022032-001 Revision: E
170
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
Refitting, parallel arm/bearing
The procedure below details how to refit the parallel arm on to the robot during repair work.
It also details how to fit a new bearing to the parallel arm as replacement.
Caution!
The parallel arm weighs 70 kg (robot version IRB 4400/45 and IRB 4450S) or 115 kg (robot
version IRB 4400/60, IRB 4400/L30, IRB 4400/L10, IRB 4400/S)! All lifting equipment
used must be dimensioned accordingly!
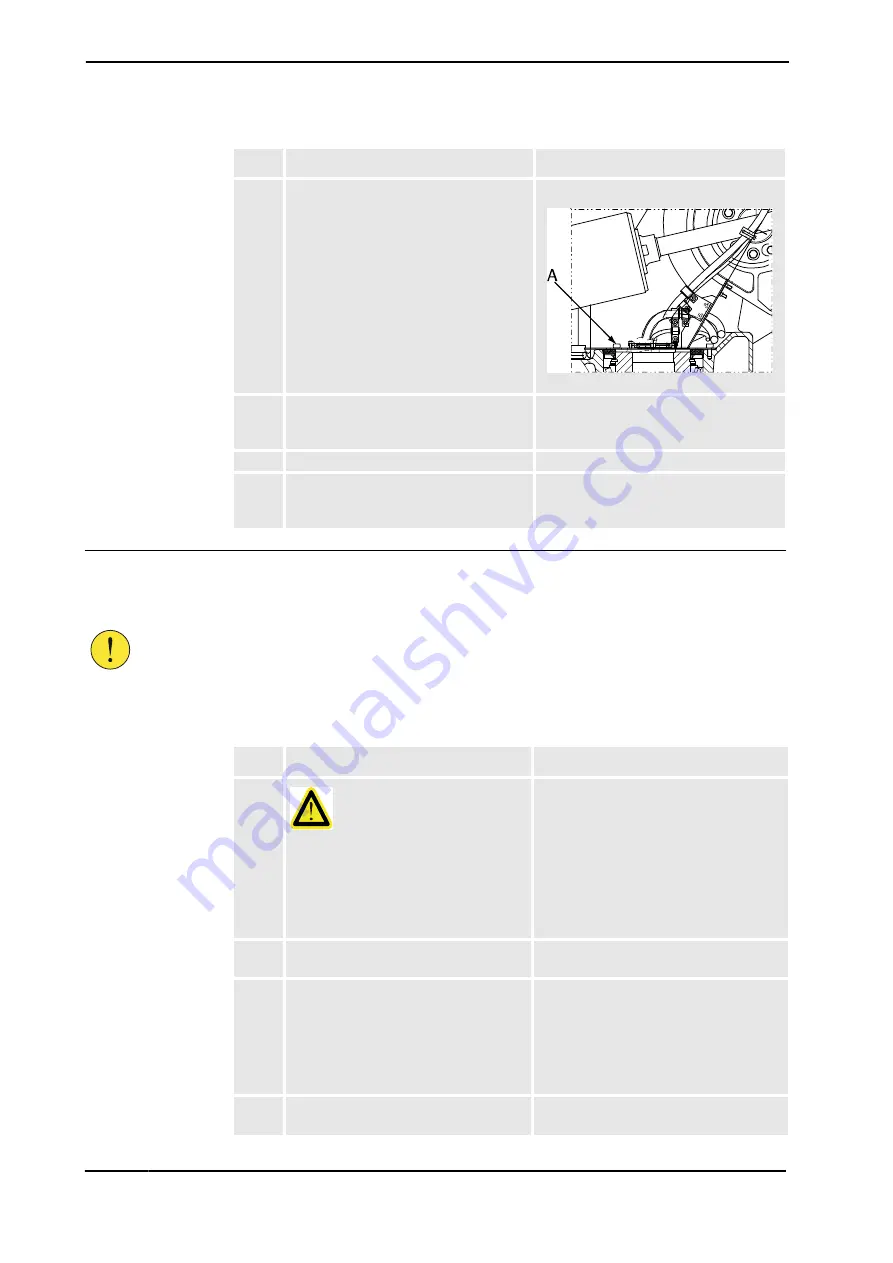
4. Loosen the attachment screws (A) so
that the cabling can be moved slightly.
xx0300000127
5. Remove the 10 attachment screws and
the washer that holds the parallel arm to
gearbox axis 3.
6. Lift away the parallel arm from the robot.
7. If they are to be replaced, remove the
bearing and sealings from the parallel
arm.
Action
Info/Illustration
Action
Info/Illustration
1.
Turn off all electric power, hydraulic and
pneumatic pressure supplies to the
robot!
For Foundry Prime robots: Do not turn
off the air pressure to motors and SMB.
2. Fit the new V-ring to the parallel arm.
Part no. is specified in
3. If the bearing is to be changed:
•
Heat the new groove ball bearing
to 170°C.
•
Fit the bearing to the parallel arm.
If the old bearing is kept:
•
Grease the bearing.
Part no. is specified in
4. Fit the sealing ring to the bearing.
Part no. is specified in
Continued
Continues on next page
Summary of Contents for IRB 4400 - 45
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 296: ......
Page 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Page 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Page 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Page 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Page 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Page 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Page 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Page 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Page 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Page 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Page 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Page 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Page 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Page 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Page 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Page 321: ......







































































