




























5 Calibration information
5.5. Updating revolution counters
243
3HAC022032-001 Revision: E
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
Step 2 - Storing the revolution counter setting with the FlexPendant
This procedure details the second step when updating the revolution counter; storing the
revolution counter setting with the FlexPendant (RobotWare 5.0).
Action
1. On the ABB menu, tap Calibration.
All mechanical units connected to the system are shown along with their calibration
status.
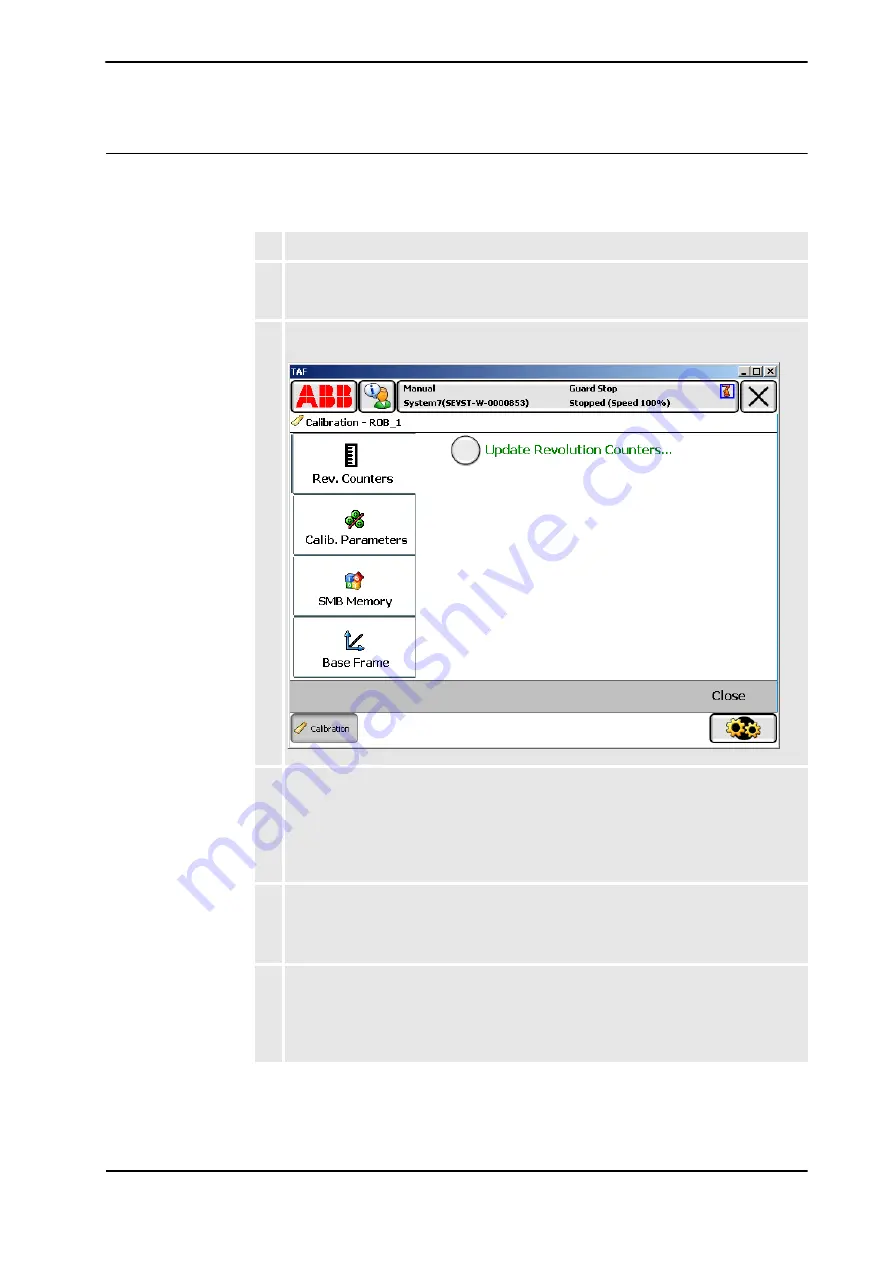
2. Tap the mechanical unit in question.
A screen is displayed: tap Rev. Counters.
en0400000771
3. Tap Update Revolution Counters....
A dialog box is displayed, warning that updating the revolution counters may change
programmed robot positions:
•
Tap Yes to update the revolution counters.
•
Tap No to cancel updating the revolution counters.
Tapping Yes displays the axis selection window.
4. Select the axis to have its revolution counter updated by:
•
Ticking in the box to the left
•
Tapping Select all to update all axes.
Then tap Update.
5. A dialog box is displayed, warning that the updating operation cannot be undone:
•
Tap Update to proceed with updating the revolution counters.
•
Tap Cancel to cancel updating the revolution counters.
Tapping Update updates the ticked revolution counters and removes the tick from the
list of axes.
Continued
Continues on next page
Summary of Contents for IRB 4400 - 45
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 296: ......
Page 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Page 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Page 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Page 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Page 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Page 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Page 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Page 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Page 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Page 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Page 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Page 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Page 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Page 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Page 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Page 321: ......
































































