
























2 Installation and commissioning
2.2.1. Pre-installation procedure
3HAC022032-001 Revision: E
38
© Copyri
ght
200
4-2008 ABB.
All rights reserved.
2.2 Unpacking
2.2.1. Pre-installation procedure
General
These instructions are to be used when unpacking and installing the robot for the first time.
They also contain information useful later during re-installation of the robot.
Checking the pre-requisites for installation
The check-list below details what must be observed before proceeding with the actual
installation of the robot:
1. Make sure only qualified installation personnel conforming to all national and local codes
are allowed to perform the installation.
2. Make sure the robot is not damaged, by visually inspecting the robot and control cabinet
exterior.
3. Make sure the lifting device to be used is dimensioned to handle the weight of the robot
.
4. If the robot is not to be installed directly, it must be stored as described in
.
5. Make sure the expected operating environment of the robot conforms to the specifications
as described in
Operating conditions, robot on page 41
.
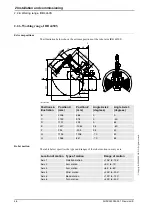
6. Before taking the robot to the installation site, make sure the site conforms to
foundation, robot - all versions except IRB 4400/S and 4450S on page 39
7. When the robot is not fastened to the floor and standing still, the robot is not stable in the
work area. Care must be taken when the arms are moved, so that the center of gravity is
not displaced which may cause the robot to tip over.
8. When these prerequisites are met, the robot may be taken to its installation site as
described in section
On-site installation on page 48
.
Weight, robot
The table below shows the weights of the different models:
L - Long arm
S - Shelf mounted robot
Robot model
Weight
IRB 4400/45
985 kg
IRB 4400/60
1040 kg
IRB 4400/L10
1040 kg
IRB 4400/L30
1060 kg
IRB 4400/S
1290 kg
IRB 4450S
1080 kg
Continues on next page
Summary of Contents for IRB 4400 - 45
Page 2: ......
Page 8: ...Table of Contents 6 3HAC022032 001 Revision E Copyright 2004 2008 ABB All rights reserved ...
Page 296: ......
Page 297: ... Copyright 2004 2006 ABB All rights reserved Foldout 1 ...
Page 298: ... Copyright 2004 2006 ABB All rights reserved Foldout 2 ...
Page 299: ... Copyright 2004 2006 ABB All rights reserved Foldout 3 1 ...
Page 301: ... Copyright 2004 2006 ABB All rights reserved Foldout 4 ...
Page 302: ... Copyright 2004 2006 ABB All rights reserved Foldout 5 ...
Page 303: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 1 ...
Page 304: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 2 ...
Page 305: ... Copyright 2004 2006 ABB All rights reserved Foldout 6 3 ...
Page 307: ... Copyright 2004 2006 ABB All rights reserved Foldout 8 ...
Page 313: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 1 3 Sheet 103 ...
Page 314: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 1 3 Sheet 104 ...
Page 315: ... Copyright 2004 2006 ABB All rights reserved Motor Axis 4 6 Sheet 105 ...
Page 316: ... Copyright 2004 2006 ABB All rights reserved Feed Back Axis 4 6 Sheet 106 ...
Page 317: ... Copyright 2004 2006 ABB All rights reserved Customer Connection Sheet 107 ...
Page 318: ... Copyright 2004 2006 ABB All rights reserved Pos Indicator Axis 1 Option Sheet 108 ...
Page 321: ......







































































